
Kawasaki révèle un véhicule à quatre pattes à l'Expo 2025 d'Osaka
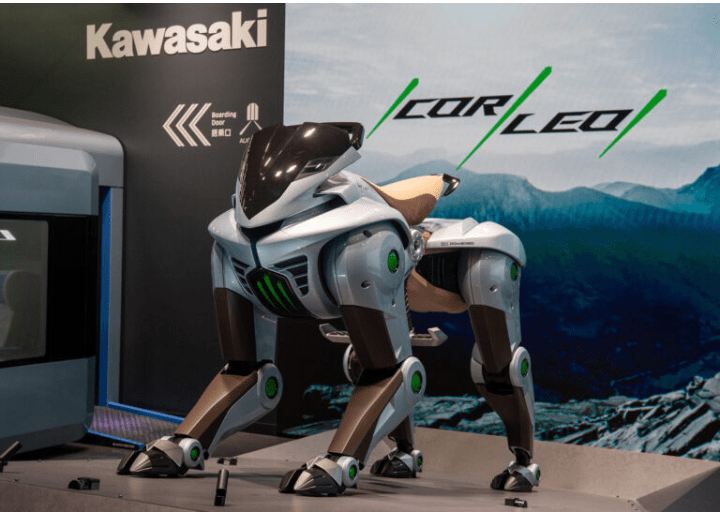
Dévoilé à l'Expo 2025 d'Osaka dans le cadre du pavillon de Kawasaki Heavy Industries sur le thème 'Instincts Mobiles', le CORLEO est un concept de mobilité futuriste tout-terrain. Alliant l'énergie de la moto à la robotique avancée et conçu pour conquérir les montagnes et traverser des terrains accidentés, la machine alimentée à hydrogène marche sur quatre pattes robotiques équipées de sabots adaptatifs. Écho de la philosophie de Kawasaki 'Amusement à Rouler', ce concept offre aux cavaliers une expérience de conduite en plein air unique.

CORLEO s'adapte au sol irrégulier avec ses sabots
Le CORLEO représente la vision de la mobilité de la corporation japonaise pour 2050, où instinct, technologie et environnement naturel évoluent en synchronisation. Le châssis du véhicule Kawasaki imite la sensation réactive d'une moto, mais au lieu de roues, il utilise des pattes articulées indépendamment avec des bras oscillants qui absorbent les chocs et s'adaptent au sol irrégulier. Chaque patte se termine par un sabot en caoutchouc antidérapant, fendu de gauche à droite pour s'adapter à des surfaces variées comme l'herbe, le gravier et la roche. Cette plateforme de mobilité à pattes maintient l'équilibre et la stabilité tout en gardant le corps du cavalier dans une posture tournée vers l'avant, même lors de l'ascension de pentes abruptes ou de la montée d'escaliers.

Un moteur à hydrogène de 150cc génère de l'électricité pour alimenter les unités de traction montées sur les jambes, avec un réservoir d'hydrogène monté à l'arrière fournissant le carburant pour garantir de faibles émissions et un fonctionnement silencieux. Le panneau de navigation à bord aide à guider les aventuriers en montrant le chemin vers le sommet, le centre de gravité du cavalier et les niveaux d'hydrogène. Pour les balades nocturnes, le CORLEO projette des marqueurs illuminés sur le terrain devant lui.
Des capteurs permettent au robot de s'adapter aux mouvements du cavalier
Conçu pour un contrôle intuitif, le CORLEO réagit aux décalages de poids du cavalier grâce à des capteurs intégrés dans les étriers et le guidon. La hauteur des étriers peut également être ajustée pour maintenir une posture ergonomique, améliorant la connexion étroite entre l'homme et la machine. Cet échange continu entre le cavalier et le système de mobilité, en plus d'offrir contrôle et confort, crée également une nouvelle expérience de conduite plus instinctive, presque animaliste.
