Autor: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Această cercetare independentă este susținută de IOSG Ventures, mulțumiri lui Hans (RoboCup Asia-Pacific), Nichanan Kesonpat (1kx), Robert Koschig (1kx), Amanda Young (Collab+Currency), Jonathan Victor (Ansa Research), Lex Sokolin (Generative Ventures), Jay Yu (Pantera Capital), Jeffrey Hu (Hashkey Capital) pentru sugestiile valoroase aduse acestui articol. În timpul redactării, s-au solicitat, de asemenea, opiniile echipelor de proiect de la OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient, Tashi Network și CodecFlow. Articolul își propune să fie obiectiv și precis, unele puncte de vedere implicând judecăți subiective, este inevitabil să existe abateri, vă rugăm să le înțelegeți.
I. O perspectivă panoramică asupra roboticii: de la automatizarea industrială la inteligența umanoidă
Lanțul industrial tradițional al roboticii a format un sistem complet, de jos în sus, stratificat, care acoperă patru segmente majore: componente de bază, sisteme de control intermediare, fabricarea completă a mașinilor și integrarea aplicațiilor. Componentele de bază (controlere, servomotoare, reductoare, senzori, baterii etc.) au cele mai mari bariere tehnologice, determinând limita inferioară a performanței și costului general al mașinii. Sistemul de control este „creierul și cerebelul” robotului, responsabil pentru luarea deciziilor, planificare și controlul mișcării. Fabricarea completă a mașinilor reflectă capacitățile de integrare a lanțului de aprovizionare. Integrarea și aplicarea sistemelor, care determină profunzimea comercializării, devin noua valoare fundamentală.
Pe baza scenariilor și formelor de aplicare, roboții globali evoluează pe calea „automatizării industriale → inteligenței bazate pe scenarii → inteligenței de uz general”, formând cinci tipuri principale: roboți industriali, roboți mobili, roboți de serviciu, roboți cu uz special și roboți umanoizi.
Roboți industriali: În prezent, singurul sector complet matur, utilizat pe scară largă în procese de fabricație precum sudarea, asamblarea, vopsirea și manipularea materialelor. Industria a stabilit un sistem standardizat de lanț de aprovizionare cu marje brute stabile și un ROI clar. Subcategoria roboților colaborativi (Coboți) pune accentul pe colaborarea om-robot, designul ușor și implementarea ușoară și înregistrează cea mai rapidă creștere. Printre companiile reprezentative se numără: ABB, Fanuc, Yaskawa Electric, KUKA, Universal Robots, JAKA și AUBO.
Roboții mobili, inclusiv AGV-urile (Vehicule Ghidate Automat) și AMR-urile (Roboți Mobili Autonomi), au fost utilizați pe scară largă în depozitarea logistică, livrarea în comerțul electronic și transportul producției, devenind cea mai matură categorie de pe piața B2B. Printre companiile reprezentative se numără Amazon Robotics, Geek+, Quicktron și Locus Robotics.
Roboți de serviciu: Vizând industrii precum curățenia, serviciile alimentare, ospitalitatea și educația, acesta este sectorul de consum cu cea mai rapidă creștere. Produsele de curățenie au intrat pe piața electronicelor de larg consum, în timp ce livrările medicale și comerciale accelerează comercializarea. În plus, apar o serie de manipulatoare de uz mai general (cum ar fi sistemul cu brațe duble de la Dyna) - mai flexibile decât produsele specifice sarcinilor, dar care nu ating încă versatilitatea roboților umanoizi. Printre companiile reprezentative se numără: Ecovacs, Roborock, Pudu Technology, Keenon Robotics, iRobot și Dyna.
Roboții specializați servesc în principal aplicații medicale, militare, de construcții, marine și aerospațiale. Deși dimensiunea pieței este limitată, marjele de profit sunt mari, iar barierele la intrare sunt puternice. Aceștia se bazează în mare măsură pe comenzi guvernamentale și corporative și se află într-o fază de creștere segmentată pe verticală. Printre proiectele tipice se numără Intuitive Surgical, Boston Dynamics, ANYbotics și NASA Valkyrie.
Roboții umanoizi sunt considerați viitoarea „platformă universală pentru forța de muncă”. Printre companiile reprezentative se numără Tesla (Optimus), Figure AI (Figura 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree Robotics, UBTECH și Logic Robotics.
Roboții umanoizi sunt în prezent cel mai urmărit domeniu de cercetare de ultimă generație. Valoarea lor fundamentală constă în structura lor umanoidă, care le permite să se adapteze la spațiile sociale existente și sunt considerați o formă cheie pentru realizarea unei „platforme universale de muncă”. Spre deosebire de roboții industriali care urmăresc eficiența maximă, roboții umanoizi pun accent pe adaptabilitatea generală și capacitățile de transfer al sarcinilor, permițându-le să intre în fabrici, locuințe și spații publice fără a modifica mediul.
În prezent, majoritatea roboților umanoizi se află în stadiul de demonstrație tehnologică, verificând în principal echilibrul dinamic, mersul și capacitățile de manipulare. Deși unele proiecte au început implementări la scară mică în medii de fabrică extrem de controlate (cum ar fi Figure × BMW și Agility Digit), și se așteaptă ca mai mulți producători (cum ar fi 1X) să intre în distribuție timpurie începând cu 2026, acestea sunt încă aplicații limitate ale „scenariilor înguste și sarcinilor unice”, mai degrabă decât o implementare cu adevărat generală a forței de muncă. Per total, comercializarea la scară largă este încă la câțiva ani distanță. Principalele blocaje includ: provocări de control, cum ar fi coordonarea cu mai multe grade de libertate și echilibrul dinamic în timp real; probleme legate de consumul de energie și autonomie limitate de densitatea energiei bateriei și eficiența conducerii; legături percepție-decizie care sunt predispuse la instabilitate și dificil de generalizat în medii deschise; lacune semnificative în date (care fac dificilă susținerea instruirii în politici generale); migrarea între corpuri nu a fost încă depășită; iar lanțul de aprovizionare cu hardware și curba costurilor (în special în afara Chinei) reprezintă încă bariere reale, crescând și mai mult dificultatea realizării implementării la scară largă și cu costuri reduse.
Se preconizează că viitoarea cale de comercializare va trece prin trei etape: pe termen scurt, se va concentra în principal pe Demo-as-a-Service, bazându-se pe proiecte pilot și subvenții; pe termen mediu, va evolua către Robotică-as-a-Service (RaaS), construind un ecosistem de sarcini și competențe; iar pe termen lung, se va concentra pe cloud-ul forței de muncă și pe serviciile inteligente de abonament, mutând accentul pe valoare de la producția de hardware la software și rețele de servicii. Per total, roboții umanoizi se află într-o perioadă critică de tranziție de la demonstrație la auto-învățare. Dacă vor putea depăși cele trei obstacole ale controlului, costului și algoritmilor va determina dacă vor putea atinge cu adevărat inteligența întrupată.
II. IA × Roboți: Zorii erei inteligenței întrupate
Automatizarea tradițională se bazează în principal pe preprogramare și control prin conducte (cum ar fi arhitectura DSOP de percepție-planificare-control), care pot funcționa fiabil doar în medii structurate. Cu toate acestea, lumea reală este mult mai complexă și dinamică. Următoarea generație de IA întrupată adoptă o paradigmă diferită: prin modele mari și învățare unificată a reprezentărilor, aceasta permite roboților să posede capacitatea de a „înțelege, prezice și acționa” în diferite scenarii. IA întrupată pune accentul pe cuplarea dinamică dintre corp (hardware), creier (model) și mediu (interacțiune); robotul este purtătorul, iar inteligența este nucleul.
IA generativă aparține domeniului inteligenței bazate pe limbaj, excelând în înțelegerea simbolurilor și semanticii; IA întrupată aparține domeniului lumii reale, stăpânind percepția și acțiunea. Acestea două corespund „creierului” și, respectiv, „corpului”, reprezentând două linii paralele ale evoluției IA. Din perspectiva ierarhiei inteligenței, IA întrupată este superioară IA generativă, dar maturitatea sa este încă semnificativ întârziată. LLM (Limited Learning Machines - Mașini de învățare limitate) se bazează pe cantități masive de date lingvistice disponibile pe internet, formând o buclă închisă clară de tipul „date → putere de calcul → implementare”; în timp ce inteligența robotică necesită date la persoana întâi, multimodale și legate de acțiune - inclusiv traiectorii de control de la distanță, videoclipuri la persoana întâi, hărți spațiale și secvențe de operare. Aceste date nu există în mod natural și trebuie generate prin interacțiune reală sau simulare de înaltă fidelitate, ceea ce le face mult mai rare și mai scumpe. Deși datele simulate și sintetice sunt utile, ele nu pot înlocui senzorii reali - experiența de mișcare. Acesta este motivul pentru care companii precum Tesla și Figure trebuie să își construiască propriile fabrici de date de control de la distanță și de ce fabricile de adnotare a datelor de la terți au apărut în Asia de Sud-Est. Pe scurt: LLM învață din datele existente, în timp ce roboții trebuie să „creeze” date prin interacțiunea cu lumea fizică. În următorii 5-10 ani, cele două vor fi profund integrate în modelul Viziune-Limbaj-Acțiune și arhitectura Agentului Întrupat - LLM va fi responsabil pentru cunoașterea și planificarea la nivel înalt, în timp ce robotul va fi responsabil pentru execuția în lumea reală, formând o buclă închisă bidirecțională de date și acțiune și promovând împreună IA de la „inteligența lingvistică” la o adevărată inteligență generală (AGI).
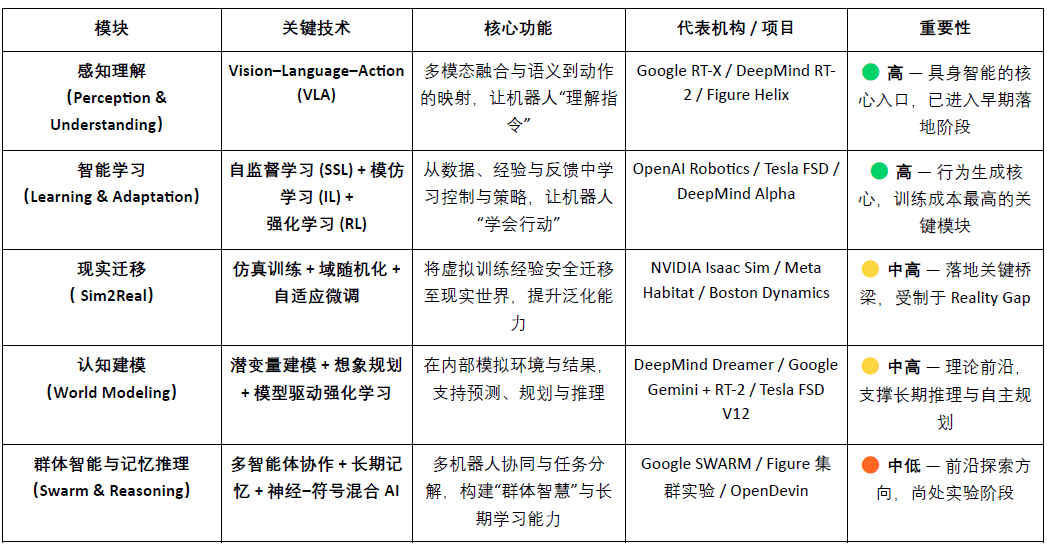
Sistemul tehnologic de bază al inteligenței întruchipate poate fi privit ca o stivă de inteligență de jos în sus: VLA (Perceptual Fusion), RL/IL/SSL (Intelligent Learning), Sim2Real (Reality Transfer), World Model (Cognitive Modeling) și Swarm & Reasoning (Multi-Agent Collaboration and Memory Reasoning). Printre acestea, VLA și RL/IL/SSL sunt „motoarele” inteligenței întruchipate, determinând implementarea și comercializarea acesteia; Sim2Real și World Model sunt tehnologii cheie care conectează antrenamentul virtual cu execuția în lumea reală; iar Swarm & Reasoning reprezintă un nivel superior de evoluție metacognitivă și de grup.
Înțelegerea perceptivă: modelul Viziune-Limbaj-Acțiune
Modelul VLA integrează trei canale - vedere, limbaj și acțiune - permițând roboților să înțeleagă intențiile din limbajul uman și să le traducă în acțiuni concrete. Procesul său de execuție include analiza semantică, recunoașterea țintei (localizarea obiectelor țintă din inputul vizual) și planificarea traseului și executarea acțiunilor, realizând astfel o buclă închisă de „înțelegere a semanticii - perceperea lumii - finalizarea sarcinii”, reprezentând o descoperire cheie în domeniul inteligenței întruchipate. Printre proiectele reprezentative actuale se numără Google RT-X, Meta Ego-Exo și Figure Helix, prezentând direcții de avangardă precum înțelegerea intermodală, percepția imersivă și controlul bazat pe limbaj.
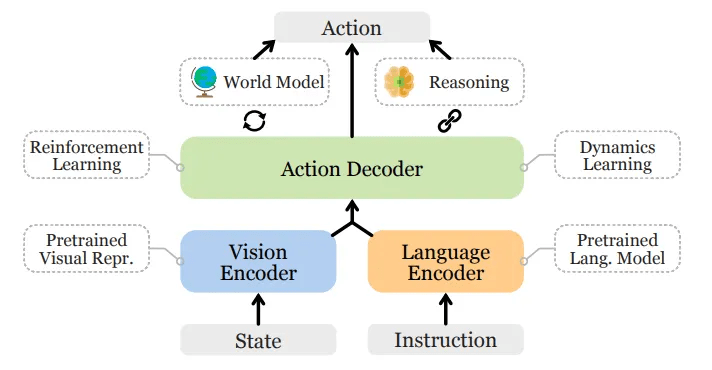
Arhitectura generală a modelului Viziune-Limbaj-Acțiune
În prezent, VLA este încă în stadii incipiente și se confruntă cu patru blocaje principale:
1) Ambiguitate semantică și generalizare slabă a sarcinii: Modelul are dificultăți în înțelegerea instrucțiunilor ambigue și deschise;
2) Aliniere instabilă între viziune și acțiune: Erorile de percepție sunt amplificate în timpul planificării și execuției traseului;
3) Datele multimodale sunt rare și nu au specificații standardizate: costurile ridicate de colectare și adnotare îngreunează formarea unei roți de date la scară largă;
4) Provocări ale axei de timp și spațiu în sarcinile de lungă durată: Durata lungă a sarcinii duce la capacități insuficiente de planificare și memorie, în timp ce intervalul spațial mare impune modelului să raționeze despre lucruri „în afara câmpului vizual”. VLA-ul actual nu are un model stabil al lumii și capacități de raționament interspațial.
Aceste probleme limitează colectiv capacitatea VLA de a generaliza în mai multe scenarii și implementarea sa la scară largă.
Învățare inteligentă: învățare autosupervizată (SSL), învățare prin imitație (IL) și învățare prin consolidare (RL)
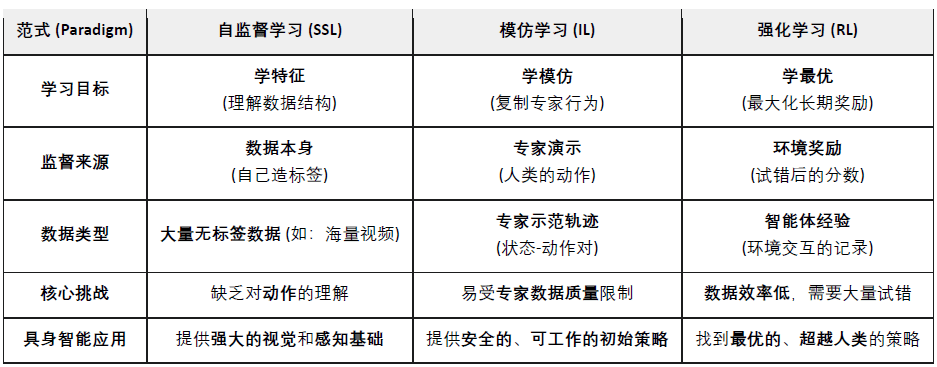
Învățare autosupervizată: Extrage automat caracteristici semantice din datele perceptive, permițând roboților să „înțeleagă lumea”. Este echivalent cu învățarea mașinilor să observe și să reprezinte.
Învățarea prin imitație: Aceasta implică stăpânirea rapidă a abilităților de bază prin imitarea demonstrațiilor umane sau a exemplelor oferite de experți. În esență, este vorba despre învățarea mașinilor să se comporte ca oamenii.
Învățare prin consolidare: Printr-un mecanism de recompensă-pedeapsă, roboții își optimizează strategiile de acțiune prin încercări și erori continue. Practic, este vorba despre învățarea mașinilor să crească prin încercări și erori.
În IA întrupată, învățarea autosupervizată (SSL) își propune să permită roboților să prezică schimbările de stare și legile fizice prin intermediul datelor perceptive, înțelegând astfel structura cauzală a lumii. Învățarea prin consolidare (RL) este motorul central pentru formarea inteligenței, determinând roboții să stăpânească comportamente complexe, cum ar fi mersul, apucarea și evitarea obstacolelor, prin interacțiunea cu mediul și optimizarea prin încercare și eroare bazată pe semnale de recompensă. Învățarea prin imitație (IL) accelerează acest proces prin demonstrație umană, permițând roboților să dobândească rapid cunoștințe anterioare despre acțiuni. Abordarea principală actuală este de a combina aceste trei elemente pentru a construi un cadru de învățare ierarhică: SSL oferă fundamentul reprezentării, IL oferă cunoștințe umane anterioare, iar RL conduce optimizarea politicilor pentru a echilibra eficiența și stabilitatea, formând împreună mecanismul central al IA întrupată de la înțelegere la acțiune.
Migrarea realității: Sim2Real – Un salt de la simulare la realitate
Sim2Real (Simulation to Reality) permite antrenarea roboților într-un mediu virtual și apoi transferarea lor în lumea reală. Acesta generează date interactive la scară largă prin intermediul unor medii de simulare de înaltă fidelitate (cum ar fi NVIDIA Isaac Sim & Omniverse și DeepMind MuJoCo), reducând semnificativ costurile de instruire și uzura hardware-ului. Principiul său fundamental este reducerea „decalajului dintre simulare și realitate”, iar principalele metode includ:
Randomizare domeniu: Ajustează aleatoriu parametri precum iluminarea, frecarea și zgomotul în timpul simulării pentru a îmbunătăți capacitatea de generalizare a modelului;
Calibrarea consistenței fizice: Folosește date reale de la senzori pentru a corecta motorul de simulare și a îmbunătăți realismul fizic;
Reglare fină adaptivă: Efectuează reantrenament rapid într-un mediu real pentru a obține un transfer stabil.
Sim2Real este veriga centrală în implementarea inteligenței întruchipate, permițând modelelor de inteligență artificială să învețe bucla închisă „percepție-decizie-control” într-o lume virtuală sigură și cu costuri reduse. Sim2Real este matur în antrenamentul prin simulare (de exemplu, NVIDIA Isaac Sim, MuJoCo), dar transferul său în lumea reală este încă limitat de Reality Gap, puterea mare de calcul și costurile de adnotare, precum și de generalizarea și securitatea insuficiente în mediile deschise. Cu toate acestea, Simularea ca serviciu (SimaaS) devine cea mai ușoară, dar și cea mai valoroasă infrastructură din punct de vedere strategic din era inteligenței întruchipate, cu modele de afaceri care includ Platforma ca serviciu (PaaS), Date ca serviciu (DaaS) și Securitatea ca serviciu (VaaS).
Modelare cognitivă: Modelul lumii – „Lumea interioară” a robotului
Un model al lumii este „creierul interior” al inteligenței întrupate, permițând roboților să simuleze intern mediul și consecințele acțiunilor lor, realizând predicții și raționament. Prin învățarea legilor dinamice ale mediului, acesta construiește o reprezentare internă previzibilă, permițând agentului să „pre-adopteze” rezultatul înainte de execuție, evoluând de la un executor pasiv la un raționament activ. Printre proiectele reprezentative se numără DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12 și NVIDIA WorldSim. Căile tehnice tipice includ:
Modelarea dinamicii latente: Comprimarea percepției de înaltă dimensiune într-un spațiu de stare latentă;
Planificare bazată pe imaginație: Încercare și eroare virtuală și predicția traiectoriei în cadrul modelului;
Învățarea prin recompensă bazată pe modele (RL) înlocuiește mediul real cu un model al lumii, reducând costurile de instruire.
Modelul Lumii se află în avangarda teoriei inteligenței întruchipate și reprezintă calea principală prin care roboții pot trece de la inteligența „reactivă” la cea „predictivă”. Cu toate acestea, este încă limitat de provocări precum modelarea complexă, predicțiile instabile pe termen lung și lipsa unor standarde unificate.
Inteligența de roi și raționamentul memorial: de la acțiunea individuală la cunoașterea colaborativă
Sistemele multi-agent și memoria și raționamentul reprezintă două direcții importante în evoluția inteligenței întruchipate de la „inteligența individuală” la „inteligența colectivă” și „inteligența cognitivă”. Împreună, ele susțin învățarea colaborativă și capacitățile adaptive pe termen lung ale sistemelor inteligente.
Colaborare multi-agent (Swarm/Cooperative RL):
Aceasta se referă la mai mulți agenți inteligenți care realizează luarea deciziilor în colaborare și alocarea sarcinilor într-un mediu partajat prin învățare distribuită sau cooperativă prin consolidare. Acest domeniu are o bază solidă de cercetare; de exemplu, experimentul OpenAI Hidden-and-Seek a demonstrat cooperarea spontană și apariția politicilor între mai mulți agenți, în timp ce algoritmii QMIX și MADDPG ai DeepMind au oferit un cadru colaborativ pentru antrenament centralizat și execuție distribuită. Aceste metode au fost aplicate și validate în scenarii precum programarea roboților de depozit, inspecția și controlul clusterelor.
Memorie și raționament:
Concentrarea pe dotarea agenților inteligenți cu memorie pe termen lung, înțelegere contextuală și capacități de raționament cauzal este o direcție cheie pentru realizarea transferului inter-sarcini și a auto-planificării. Cercetările tipice includ DeepMind Gato (un agent multi-sarcină unificat pentru percepție-limbaj-control) și seria DeepMind Dreamer (planificare imaginativă bazată pe modele ale lumii), precum și agenți întrupați deschiși, cum ar fi Voyager, care realizează învățarea continuă prin memorie externă și auto-evoluție. Aceste sisteme pun bazele pentru ca roboții să posede capacitatea de a „își aminti trecutul și de a prezice viitorul”.
Peisajul global al industriei inteligente: Cooperarea și concurența coexistă
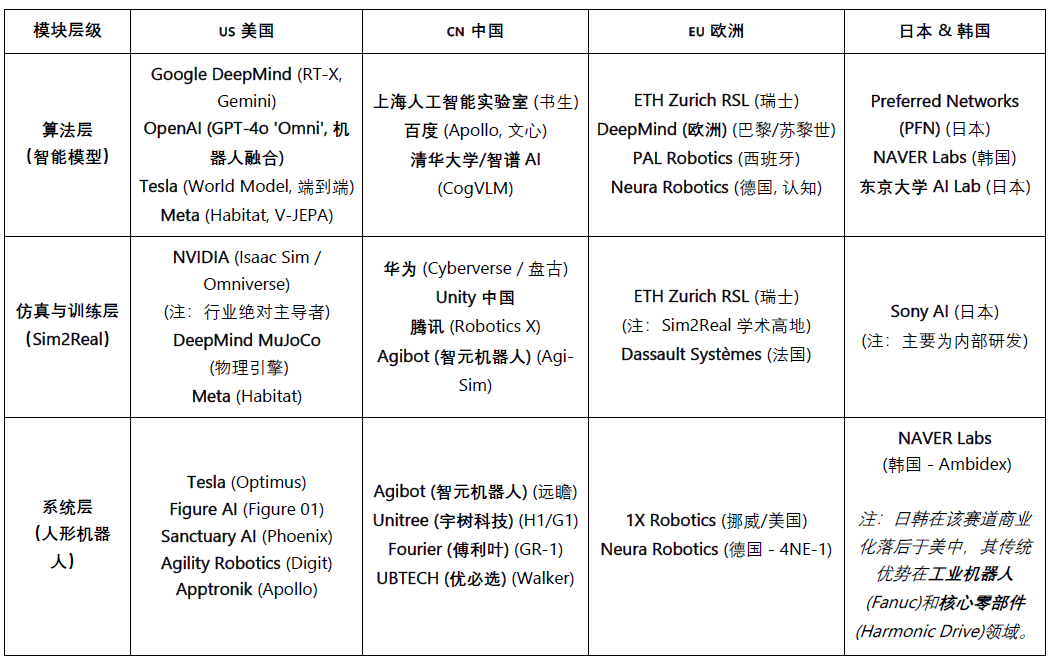
Industria robotică globală se află în prezent într-o perioadă de „concurență intensificată și bazată pe cooperare”. Eficiența lanțului de aprovizionare al Chinei, capacitățile de inteligență artificială ale Statelor Unite, precizia componentelor din Japonia și standardele industriale ale Europei modelează împreună peisajul pe termen lung al industriei robotice globale.
SUA își menține o poziție de lider în modelele și software-ul de inteligență artificială de ultimă generație (DeepMind, OpenAI, NVIDIA), dar acest avantaj nu s-a extins la hardware-ul robotic. Producătorii chinezi au un avantaj în ceea ce privește viteza de iterație și performanța în lumea reală. SUA promovează revenirea industriilor prin intermediul Legii CHIPS și al IRA (Legea de reducere a inflației).
China și-a stabilit un avantaj de top în domeniile componentelor, fabricilor automatizate și roboților umanoizi prin producție la scară largă, integrare verticală și inițiative bazate pe politici. Capacitățile sale hardware și ale lanțului de aprovizionare sunt remarcabile, companii precum Unitree Robotics și UBTECH realizând deja producția de masă și extinzându-și acoperirea la nivelul decizional inteligent. Cu toate acestea, există o diferență semnificativă între China și Statele Unite în ceea ce privește nivelurile de antrenament prin algoritmi și simulare.
Japonia a deținut mult timp monopolul asupra componentelor de înaltă precizie și a tehnologiei de control al mișcării, iar sistemul său industrial este robust. Cu toate acestea, integrarea modelelor de inteligență artificială este încă în stadii incipiente, iar ritmul de inovare este relativ lent.
Coreea de Sud se remarcă prin popularizarea roboților de consum – condusă de companii precum LG și NAVER Labs – și posedă un ecosistem de roboți de servicii matur și robust.
Europa are sisteme inginerești și standarde de siguranță bine stabilite. Companii precum 1X Robotics rămân active în cercetare și dezvoltare, dar unele procese de fabricație au fost externalizate, iar accentul inovației se îndreaptă către colaborare și standardizare.
III. Roboți × IA × Web3: Viziune narativă și traiectorie realistă
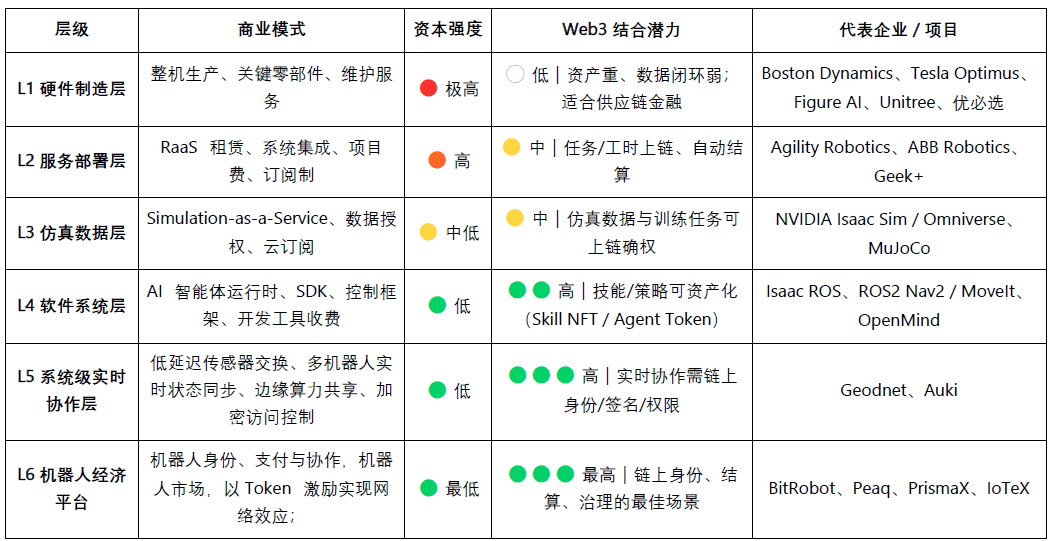
În 2025, o nouă narațiune a apărut în industria Web3, fuzionând cu robotica și inteligența artificială. Deși Web3 este considerat protocolul fundamental al unei economii descentralizate a mașinilor, valoarea și fezabilitatea sa în combinarea diferitelor straturi rămân clar diferențiate:
Producția de hardware și serviciile necesită mult capital și au bucle de date slabe, așa că Web3 poate juca în prezent doar un rol de sprijin în domenii periferice, cum ar fi finanțarea lanțului de aprovizionare sau leasingul de echipamente.
Ecosistemul de simulare și cel software sunt extrem de compatibile, datele de simulare și sarcinile de antrenament pot fi înregistrate pe blockchain, iar agenții inteligenți și modulele de competențe pot fi activate prin NFT-uri sau Agent Token-uri.
La nivel de platformă, rețelele descentralizate de muncă și colaborare își demonstrează cel mai mare potențial - Web3 poate construi treptat o „piață a muncii automate” de încredere printr-un mecanism integrat de identitate, stimulente și guvernanță, punând bazele instituționale pentru economia automată a viitorului.
Dintr-o perspectivă pe termen lung, straturile de colaborare și platformă reprezintă cele mai valoroase domenii pentru integrarea Web3 cu robotica și inteligența artificială. Pe măsură ce roboții dobândesc treptat percepție, limbaj și capacități de învățare, aceștia evoluează în indivizi inteligenți capabili de luarea autonomă a deciziilor, de colaborare și de creare a valorii economice. Cu toate acestea, pentru ca acești „muncitori inteligenți” să participe cu adevărat la sistemul economic, ei trebuie să depășească încă patru obstacole principale: identitatea, încrederea, stimulentele și guvernanța.
La nivel de identitate, mașinile trebuie să posede identități digitale verificabile și trasabile. Prin intermediul Machine DID, fiecare robot, senzor sau dronă poate genera un „card de identitate” unic și verificabil pe blockchain, care să îi lege proprietatea, înregistrările de comportament și domeniul de aplicare al permisiunilor, permițând astfel interacțiunea securizată și responsabilitatea.
La nivelul de încredere, cheia este de a face „munca mașinilor” verificabilă, măsurabilă și evaluabilă. Prin valorificarea contractelor inteligente, a oracolelor și a mecanismelor de audit, combinate cu Dovada Muncii Fizice (PoPW), Mediile de Execuție de Încredere (TEE) și Dovezile Zero-Knowledge (ZKP), se poate asigura autenticitatea și trasabilitatea procesului de execuție a sarcinilor, oferind comportamentului mașinilor valoare economică.
La nivelul de stimulare, Web3 permite decontarea automată și transferul de valoare între mașini printr-un sistem de stimulare token, abstractizarea conturilor și canale de stare. Roboții pot realiza leasingul de putere de calcul și partajarea datelor prin microplăți și pot asigura îndeplinirea sarcinilor prin mecanisme de staking și penalizare; cu ajutorul contractelor inteligente și oracolelor, se poate forma și o „piață de colaborare între mașini” descentralizată care nu necesită programare manuală.
La nivelul de guvernanță, odată ce mașinile posedă autonomie pe termen lung, Web3 oferă un cadru de guvernanță transparent și programabil: guvernanță DAO pentru parametrii sistemului de luare a deciziilor partajați și mecanisme de semnătură multiplă și reputație pentru menținerea securității și ordinii. Pe termen lung, acest lucru va propulsa societatea de mașini către o etapă de „guvernanță algoritmică” - în care oamenii stabilesc obiective și limite, iar mașinile mențin stimulentele și echilibrul prin contracte.
Viziunea supremă pentru convergența dintre Web3 și robotică: o rețea de evaluare în lumea reală - un „motor de inferență în lumea reală” compus din roboți distribuiți, care testează și evaluează continuu capacitățile modelului în scenarii fizice diverse și complexe; și o piață a muncii robotizată - roboți care efectuează sarcini verificabile în lumea reală la nivel global, obținând venituri prin decontare în lanț și reinvestind această valoare în putere de calcul sau upgrade-uri hardware.
Dintr-o perspectivă practică, integrarea inteligenței întruchipate și a Web3 se află încă într-un stadiu exploratoriu incipient, iar economiile descentralizate bazate pe inteligență artificială rămân în mare parte la nivelul dezvoltării narative și conduse de comunitate. Direcțiile de integrare fezabile și potențial viabile în realitate se află în principal în următoarele trei aspecte:
(1) Crowdsourcing de date și confirmarea proprietății - Web3 încurajează contribuitorii să încarce date din lumea reală prin mecanisme de stimulare și trasabilitate în lanț;
(2) Participare globală de tip „long-tail” – microplățile transfrontaliere și mecanismele de microstimulere reduc eficient costurile de colectare și distribuție a datelor;
(3) Financiarizare și inovare colaborativă - Modelul DAO poate promova activarea roboților, emiterea de certificate de venit și mecanismul de decontare între mașini.
Per total, pe termen scurt, accentul se pune în principal pe colectarea datelor și pe straturile de stimulare; pe termen mediu, se așteaptă progrese în ceea ce privește „plățile cu stablecoin + agregarea datelor long-tail” și nivelurile de activare și decontare RaaS; pe termen lung, dacă roboții umanoizi se răspândesc pe scară largă, Web3 ar putea deveni fundamentul instituțional pentru deținerea de mașini, distribuția veniturilor și guvernanță, promovând formarea unei economii cu adevărat descentralizate a mașinilor.
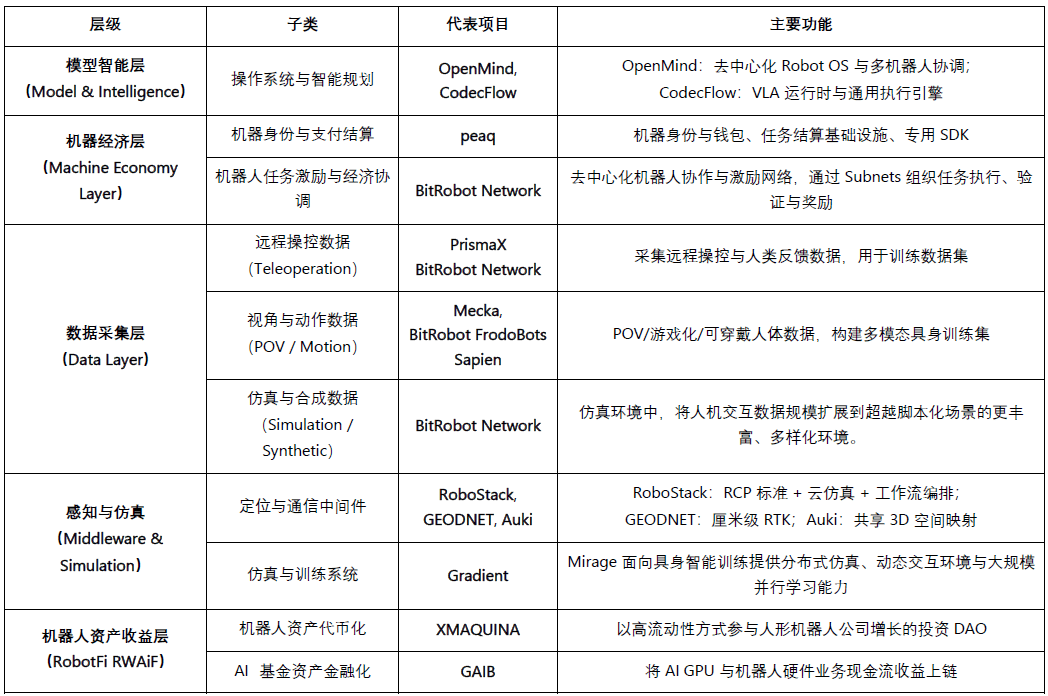
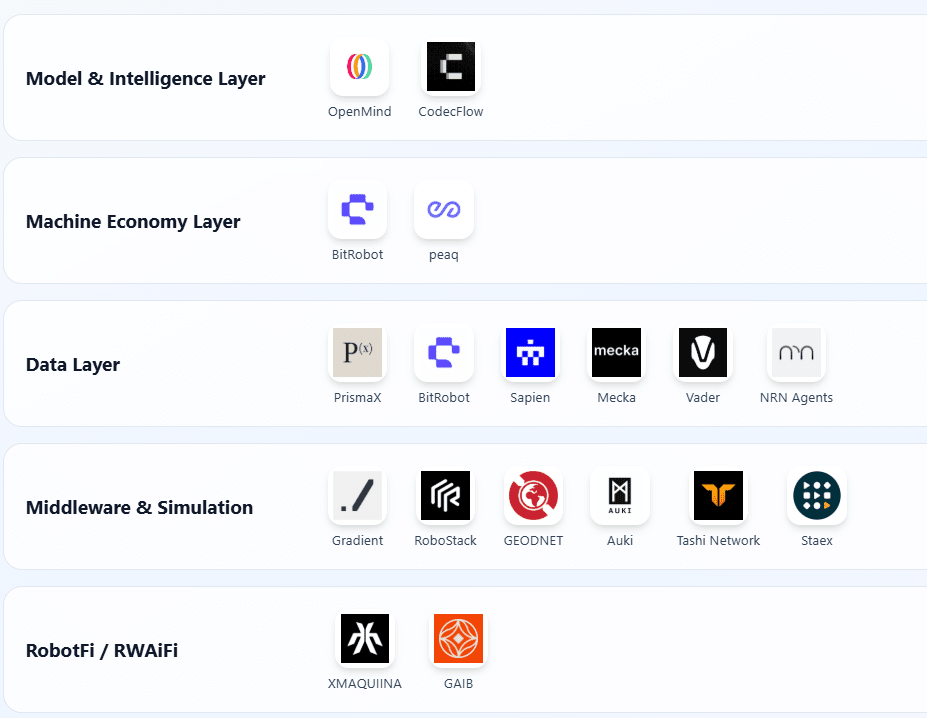
IV. Harta ecosistemului robotic Web3 și cazuri selectate
Pe baza a trei criterii — progres verificabil, deschidere tehnologică și relevanță pentru industrie — am întocmit o listă de proiecte reprezentative de Web3 × Robotică și le-am clasificat în cinci straturi: Stratul de Inteligență a Modelului, Stratul de Economia Mașinilor, Stratul de Achiziție a Datelor, Stratul de Fundație a Percepției și Simulării și Stratul de Venituri din Activele Roboticelor. Pentru a menține obiectivitatea, am eliminat proiectele care „sunt în mod clar pe val” sau cărora le lipsesc suficiente informații; orice omisiune poate fi semnalată.
Model și strat de informații
Openmind - Construirea de Android pentru roboți (https://openmind.org/)
OpenMind este un sistem de operare open-source (Robot OS) pentru inteligența artificială încorporată și controlul roboților, care își propune să construiască primul mediu de rulare descentralizat și o platformă de dezvoltare pentru roboți din lume. Nucleul proiectului constă din două componente principale:
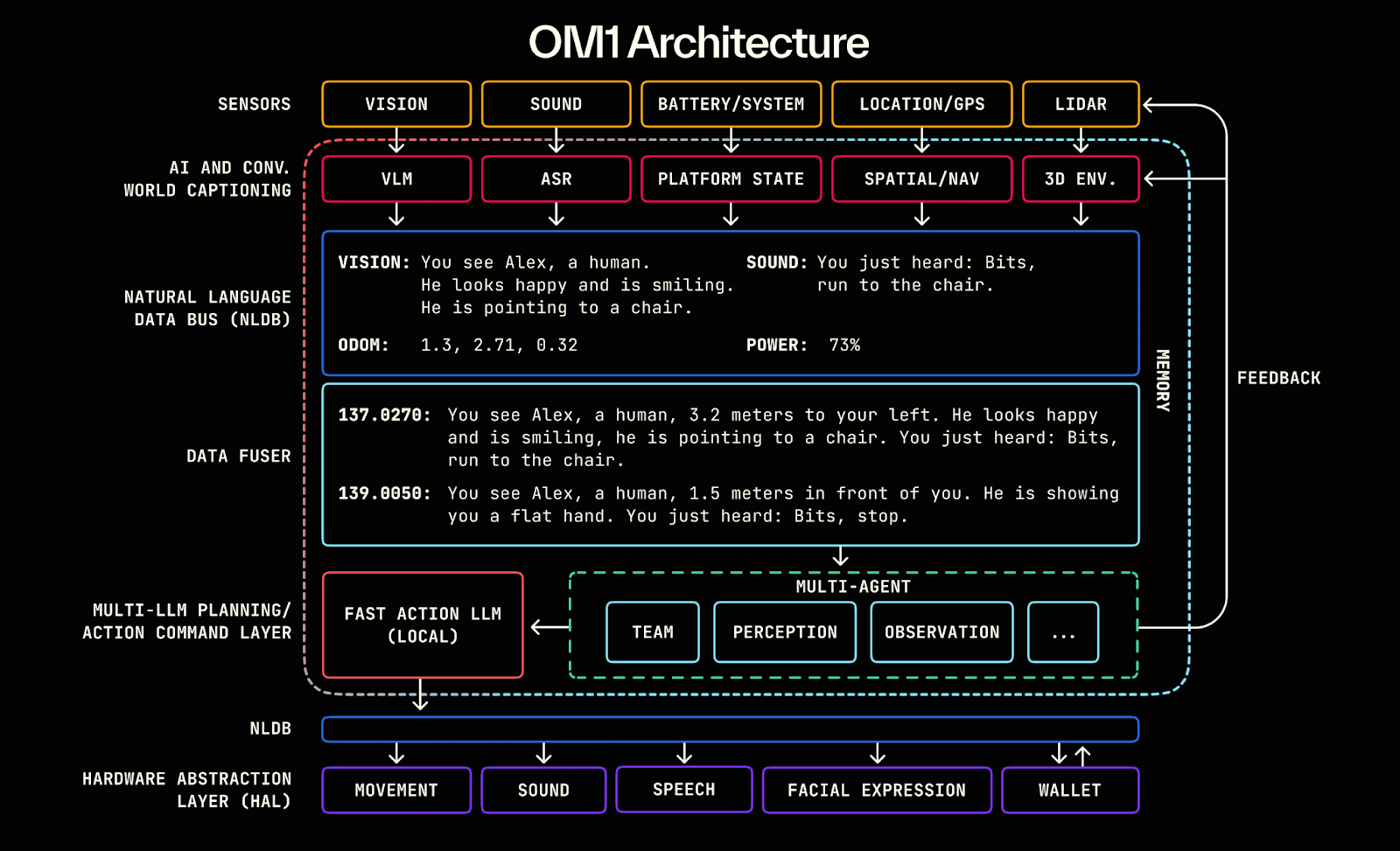
OM1: Un strat modular, open-source, de execuție a inteligenței artificiale, construit pe ROS2, utilizat pentru a orchestra procesele de percepție, planificare și acțiune pentru roboții digitali și fizici;
FABRIC: Stratul de coordonare Fabric conectează puterea de cloud computing, modelele și roboții din lumea reală, permițând dezvoltatorilor să controleze și să antreneze roboți într-un mediu unificat.
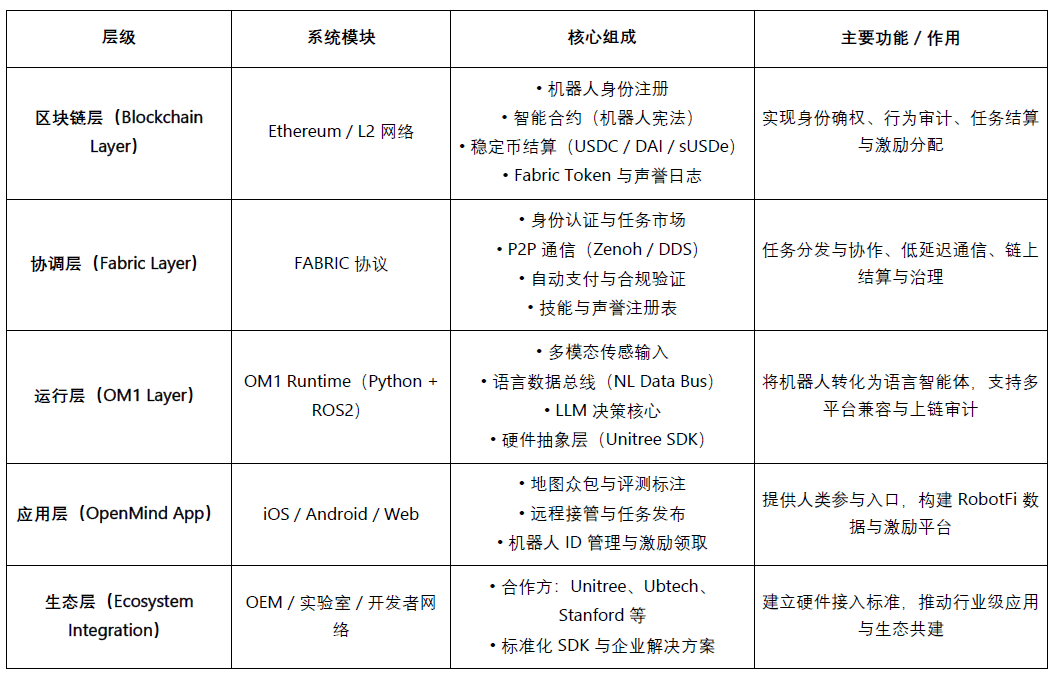
În esență, OpenMind acționează ca un strat intermediar inteligent între Modelul Limbajului Mare (LLM) și lumea robotică, transformând cu adevărat inteligența limbajului în inteligență întrupată și construind un cadru inteligent de la înțelegere (Limbaj → Acțiune) la aliniere (Blockchain → Reguli). Sistemul multistratificat al OpenMind realizează o buclă colaborativă completă: oamenii oferă feedback și adnotări (date RLHF) prin intermediul aplicației OpenMind; Rețeaua Fabric se ocupă de autentificare, alocarea sarcinilor și coordonarea decontării; iar roboții OM1 execută sarcini și urmează „constituția robotului” blockchain-ului pentru a finaliza auditarea comportamentului și plata, realizând astfel o rețea descentralizată de colaborare între mașini, cu feedback uman → colaborare între sarcini → decontare on-chain.
Progresul proiectului și evaluarea realității
OpenMind se află într-un stadiu incipient de „fezabil din punct de vedere tehnic, dar încă nu viabil din punct de vedere comercial”. Sistemul central OM1 Runtime a fost open-source pe GitHub, poate rula pe mai multe platforme și acceptă input multimodal. Realizează înțelegerea sarcinilor de la limbaj la acțiune prin intermediul Natural Language Data Bus (NLDB). Are o originalitate ridicată, dar este încă experimental. Rețeaua Fabric și așezarea on-chain au finalizat doar designul stratului de interfață.
În ceea ce privește ecosistemul, proiectul a încheiat parteneriate cu companii de hardware open source precum Unitree, Ubtech și TurtleBot, precum și cu universități precum Stanford, Oxford și Seoul Robotics, în principal pentru validare educațională și de cercetare, fără aplicații industriale încă. Aplicația a fost lansată într-o versiune beta, dar funcțiile de stimulare și de implementare a sarcinilor sunt încă în stadii incipiente.
În ceea ce privește modelul de afaceri, OpenMind a construit un ecosistem cu trei niveluri, format din OM1 (sistem open-source), Fabric (protocol de decontare) și Skill Marketplace (nivelul de stimulare). În prezent, nu are venituri și se bazează pe aproximativ 20 de milioane de dolari în finanțare în stadiu incipient (de la Pantera, Coinbase Ventures și DCG). Per total, deși tehnologia sa este de vârf, comercializarea și dezvoltarea ecosistemului sunt încă în stadii incipiente. Dacă Fabric este implementat cu succes, are potențialul de a deveni „Android-ul erei inteligente”, dar acest lucru implică un ciclu lung de dezvoltare, risc ridicat și o dependență puternică de hardware.
CodecFlow - Motorul de execuție pentru robotică (https://codecflow.ai)
CodecFlow este un protocol descentralizat de execuție (Fabric) bazat pe rețeaua Solana, conceput pentru a oferi un mediu de execuție la cerere pentru agenții de inteligență artificială și sistemele robotice, permițând fiecărui agent să dețină o „mașină instantanee”. Nucleul proiectului constă din trei module principale:
Fabric: Un strat de agregare a puterii de calcul inter-cloud (Weaver + Shuttle + Gauge) care poate genera mașini virtuale securizate, containere GPU sau noduri de control al roboților pentru sarcini de inteligență artificială în câteva secunde;
SDK optr: Intelligent Agent Execution Framework (Python Interface) pentru crearea de „operatori” care pot opera roboți desktop, simulați sau reali;
Stimulente prin tokenuri: Un strat de stimulente și plăți on-chain care conectează furnizorii de servicii de calcul, dezvoltatorii de agenți inteligenți și utilizatorii de sarcini automatizate pentru a forma o piață descentralizată a puterii de calcul și a sarcinilor.
Obiectivul principal al CodecFlow este de a crea o „fundație de execuție descentralizată pentru operatorii de inteligență artificială și roboți”, permițând oricărui agent inteligent să ruleze în siguranță în orice mediu (Windows / Linux / ROS / MuJoCo / controler de robot), realizând o arhitectură de execuție universală de la planificarea puterii de calcul (Fabric) → mediul de sistem (System Layer) → percepție și acțiune (VLA Operator).
Progresul proiectului și evaluarea realității
Versiuni timpurii ale framework-ului Fabric (Go) și optr SDK (Python) au fost lansate, permițând lansarea de instanțe de calcul izolate în medii web sau de linie de comandă. Operator Marketplace, poziționat ca un strat de execuție descentralizat pentru puterea de calcul a inteligenței artificiale, este așteptată să fie lansată până la sfârșitul anului 2025.
Printre clienții noștri principali se numără dezvoltatori de inteligență artificială, echipe de cercetare în robotică și companii de operațiuni de automatizare.

Stratul Economiei Mașinilor
BitRobot - Laboratorul Deschis de Robotică al Lumii (https://bitrobot.ai)
BitRobot este o rețea descentralizată de cercetare și colaborare (Open Robotics Lab) pentru dezvoltarea de inteligență artificială întrupată și robotică, inițiată în comun de FrodoBots Labs și Protocol Labs. Viziunea sa principală este de a utiliza o arhitectură deschisă de „subrețele + mecanisme de stimulare + muncă verificabilă (VRW)”, cu următoarele funcții principale:
Definiți și verificați contribuția reală a fiecărei sarcini robotice prin standardul VRW (Verifiable Robotic Work - Lucru Robotic Verificabil);
Oferiți roboților identitate on-chain și responsabilitate economică prin ENT (Embodied Node Token);
Organizarea colaborării interregionale între cercetători, putere de calcul, echipamente și operatori prin intermediul subrețelelor;
Realizarea unui proces decizional bazat pe stimulente și a unei guvernanțe a cercetării științifice prin „co-guvernare om-mașină” prin intermediul Senatului + inteligenței artificiale Gandalf.
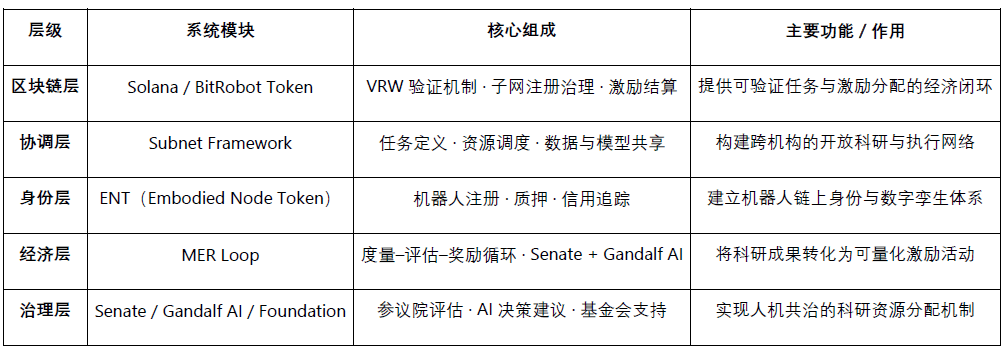
De la lansarea cărții sale albe în 2025, BitRobot a operat mai multe subrețele (cum ar fi SN/01 ET Fugi și SN/05 SeeSaw de la Virtuals Protocol) pentru a realiza controlul descentralizat de la distanță și colectarea de date din lumea reală și a lansat un fond Grand Challenges în valoare de 5 milioane de dolari pentru a promova o competiție globală de cercetare pentru dezvoltarea de modele.
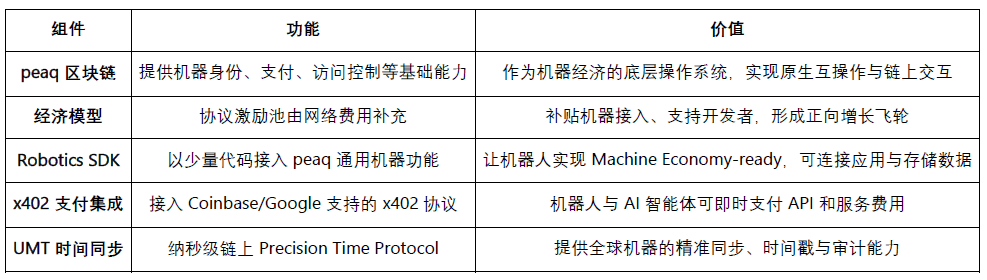
peaq – Economia Lucrurilor (https://www.peaq.network)
PeaQ este o blockchain Layer-1 concepută special pentru economia mașinilor, oferind milioanelor de roboți și dispozitive capabilități subiacente, cum ar fi identitatea mașinilor, portofele on-chain, controlul accesului și sincronizarea timpului la nivel de nanosecunde (Universal Machine Time). SDK-ul său de robotică permite dezvoltatorilor să facă roboții „pregătiți pentru economia mașinilor” cu un cod minim, realizând interoperabilitate și interacțiune între furnizori și sisteme.
În prezent, Peaq a lansat prima fermă robotică tokenizată din lume și oferă suport pentru peste 60 de aplicații robotice din lumea reală. Cadrul său de tokenizare ajută companiile de robotică să strângă fonduri pentru hardware cu capital intensiv și extinde participarea de la B2B/B2C tradițional la un nivel comunitar mai larg. Cu un fond de stimulente la nivel de protocol injectat prin taxe de rețea, Peaq subvenționează accesul la dispozitive noi și sprijină dezvoltatorii, creând un motor economic care accelerează extinderea proiectelor de robotică și inteligență artificială fizică.
Stratul de achiziție a datelor
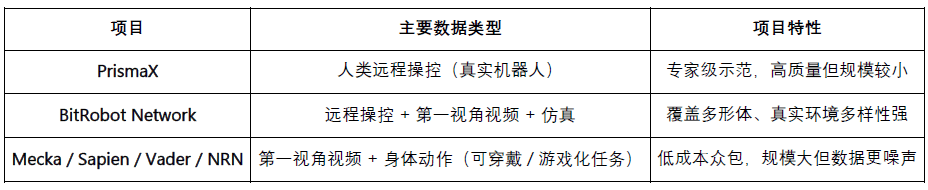
Acesta își propune să abordeze problema rarității și costului ridicat al datelor de înaltă calitate din lumea reală în antrenamentul pentru inteligență întrupată. Colectează și generează date de interacțiune om-calculator prin multiple căi, inclusiv control de la distanță (PrismaX, BitRobot Network), perspectivă la persoana întâi și captura de mișcare (Mecka, BitRobot Network, Sapien, Vader, NRN), precum și simulare și date sintetice (BitRobot Network), oferind o bază de antrenament scalabilă și generalizabilă pentru modelele de roboți.
Este important de clarificat faptul că Web3 nu este expert în „producția de date” - giganții Web2 depășesc cu mult orice proiect DePIN în ceea ce privește hardware-ul, algoritmii și eficiența colectării datelor. Adevărata sa valoare constă în remodelarea mecanismelor de distribuție și stimulare a datelor. Bazat pe un „model de rețea de plăți stablecoin + crowdsourcing”, acesta realizează decontări cu costuri reduse și sume mici, trasabilitatea contribuțiilor și împărțirea automată a profiturilor printr-un sistem de stimulare fără permisiune și un mecanism de confirmare a proprietății în lanț. Cu toate acestea, open crowdsourcing-ul se confruntă în continuare cu provocări în ceea ce privește calitatea și închiderea cererii - calitatea datelor variază foarte mult și există o lipsă de verificare eficientă și cumpărători stabili.
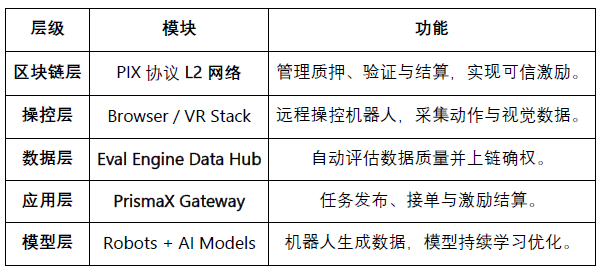
PrismaX (https://gateway.prismax.ai)
PrismaX este o rețea descentralizată de telecontrol și economie a datelor pentru IA întrupată, care își propune să construiască o „piață globală a muncii robotizate” în care operatorii umani, dispozitivele robotice și modelele de IA evoluează împreună printr-un sistem de stimulare on-chain. Nucleul proiectului cuprinde două componente principale:
Teleoperation Stack — un sistem de control de la distanță (interfață browser/VR + SDK) care conectează brațe robotice și roboți de serviciu din întreaga lume, permițând controlul uman în timp real și colectarea de date;
Eval Engine – un motor de evaluare și verificare a datelor (CLIP + DINOv2 + scor semantic al fluxului optic) – generează un scor de calitate pentru fiecare traiectorie de operațiune și îl stabilește pe blockchain.
PrismaX transformă acțiunile umane în date de învățare automată printr-un mecanism descentralizat de stimulare, construind o buclă închisă completă de la control de la distanță → colectare de date → antrenament de model → decontare on-chain, realizând astfel o economie circulară în care „munca umană este un activ de date”.
Progresul proiectului și evaluarea în lumea reală: PrismaX a lansat versiunea beta (gateway.prismax.ai) în august 2025, permițând utilizatorilor să controleze de la distanță un braț robotic pentru a efectua experimente de prindere și a genera date de antrenament. Motorul Eval rulează deja intern. Per total, PrismaX demonstrează un nivel ridicat de implementare tehnică și o poziționare clară ca middleware cheie care conectează „operarea umană × modelul AI × decontarea blockchain”. Potențialul său pe termen lung constă în a deveni un „protocol descentralizat de muncă și date pentru era inteligenței întruchipate”, dar se confruntă încă cu provocări în scalare pe termen scurt.
Rețeaua BitRobot (https://bitrobot.ai/)
Rețeaua BitRobot își folosește subrețelele pentru a colecta date din surse multiple, inclusiv video, control de la distanță și simulare. SN/01 ET Fugi permite utilizatorilor să controleze de la distanță roboții pentru a finaliza sarcini, colectând date de navigare și percepție într-o interacțiune „în stilul Pokémon Go din viața reală”. Această abordare a dus la crearea setului de date FrodoBots-2K, unul dintre cele mai mari seturi de date de navigație om-robot open-source disponibile în prezent, utilizat de instituții precum UC Berkeley RAIL și Google DeepMind. SN/05 SeeSaw (Virtual Protocol) folosește iPhone-uri pentru a colecta date video de tip first-person în medii reale. Alte subrețele publicate, cum ar fi RoboCap și Rayvo, se concentrează pe colectarea de date video de tip first-person folosind dispozitive fizice low-cost.
Mecca (https://www.mecka.ai)
Mecka este o companie de date robotice care folosește colectarea de date mobile gamificată și hardware personalizat pentru a colecta videoclipuri din perspectiva persoanei întâi, date despre mișcarea umană și demonstrații de sarcini pentru a construi seturi de date multimodale la scară largă care susțin antrenarea modelelor de inteligență întrupată.
Sapien (https://www.sapien.io/)
Sapien este o platformă de crowdsourcing axată pe „date despre mișcarea umană care stimulează inteligența roboților”. Aceasta colectează mișcări, posturi și interacțiuni umane prin intermediul dispozitivelor portabile și aplicațiilor mobile pentru a antrena modele inteligente întruchipate. Proiectul își propune să construiască cea mai mare rețea de date despre mișcarea umană din lume, făcând din comportamentul uman natural sursa fundamentală de date pentru învățarea și generalizarea roboților.
Vader(https://www.vaderai.ai)
Vader furnizează prin crowdsourcing videoclipuri și demonstrații de sarcini din perspectiva persoanei întâi prin intermediul aplicației sale MMO din lumea reală, EgoPlay: utilizatorii înregistrează activitățile zilnice dintr-o perspectivă a persoanei întâi și câștigă recompense $VADER. Canalul său de date ORN convertește filmările brute din perspectiva punctului de vedere în seturi de date structurate care păstrează confidențialitatea, conținând etichete de acțiune și descrieri semantice, care pot fi utilizate direct pentru antrenarea politicilor roboților umanoizi.
Agenți NRN (https://www.nrnagents.ai/)
O platformă de date RL întrupată, gamificată, care colectează prin crowdsourcing date demonstrative umane prin controlul roboților bazat pe browser și competiții simulate. NRN generează traiectorii comportamentale cu coadă lungă prin sarcini „competitive” pentru învățarea prin imitație și învățarea prin consolidare continuă și servește ca o primitivă de date scalabilă pentru a sprijini instruirea politicilor de la simulare la realitate.
Compararea proiectelor de nivel inteligent de achiziție a datelor încorporate
Percepție și simulare (middleware și simulare)
Stratul de percepție și simulare oferă roboților infrastructura de bază care conectează lumea fizică și procesul decizional inteligent, inclusiv capabilități precum localizarea, comunicarea, modelarea spațială și antrenamentul prin simulare. Acesta servește drept „schelet al stratului intermediar” pentru construirea de sisteme inteligente integrate la scară largă. În prezent, acest domeniu se află încă în stadiul său exploratoriu incipient, cu diverse proiecte care dezvoltă machete diferențiate în domenii precum poziționarea de înaltă precizie, calculul spațial partajat, standardizarea protocoalelor și simularea distribuită. Încă nu a apărut un standard unificat sau un ecosistem interoperabil.
Middleware și infrastructură spațială
Capacitățile de bază ale roboticii — navigarea, localizarea, conectivitatea și modelarea spațială — formează o punte crucială care leagă lumea fizică de procesul decizional inteligent. În timp ce proiectele DePIN mai ample (Silencio, WeatherXM, DIMO) încep să se refere la „robotică”, următoarele proiecte sunt cel mai direct legate de inteligența întrupată.
RoboStack – Stivă de operare pentru roboți cloud-nativă (https://robostack.io)
RoboStack este un middleware cloud-nativ pentru roboți care permite programarea în timp real, controlul de la distanță și interoperabilitatea între platforme a sarcinilor roboților prin RCP (Robot Context Protocol) și oferă simulare în cloud, orchestrare a fluxurilor de lucru și capacități de acces al agenților.
GEODNET – Rețea GNSS descentralizată (https://geodnet.com)
GEODNET este o rețea GNSS globală descentralizată care oferă poziționare RTK de înaltă precizie la nivel centimetric. Prin intermediul stațiilor de bază distribuite și al stimulentelor on-chain, aceasta oferă un „strat de referință geografică” în timp real pentru drone, vehicule autonome și roboți.
Auki – Posemesh pentru calcul spațial (https://www.auki.com)
Auki a construit o rețea descentralizată de calcul spațial Posemesh care generează hărți de mediu 3D în timp real prin intermediul senzorilor și nodurilor de calcul colaborative, oferind un reper spațial comun pentru realitate augmentată (AR), navigarea roboților și colaborarea multi-dispozitiv. Este o infrastructură cheie care conectează spațiul virtual cu scenariile din lumea reală, stimulând convergența AR și roboticii.
Rețeaua Tashi — O rețea colaborativă tip plasă în timp real pentru roboți (https://tashi.network)
O rețea mesh descentralizată, în timp real, care atinge un consens sub 30 ms, schimb de senzori cu latență redusă și sincronizare a stării mai multor roboți. SDK-ul său MeshNet acceptă SLAM partajat, colaborare în roi și actualizări robuste ale hărților, oferind un strat de colaborare în timp real de înaltă performanță pentru IA întruchipată.
Staex — Rețea descentralizată de conectivitate și telemetrie (https://www.staex.io)
Provenind de la departamentul de cercetare și dezvoltare al Deutsche Telekom, stratul de conectivitate descentralizat oferă comunicare securizată, telemetrie fiabilă și capacități de rutare de la dispozitiv la cloud, permițând flotelor de roboți să facă schimb de date în mod fiabil și să colaboreze între diferiți operatori.
Sistem de simulare și învățare distribuită
Gradient - Către o inteligență deschisă (https://gradient.network/)
Gradient este o clădire de laborator de inteligență artificială „Open Intelligence”, dedicată facilitării antrenamentului distribuit, inferenței, validării și simulării bazate pe o infrastructură descentralizată. Setul său tehnologic actual include Parallax (inferență distribuită), Echo (învățare distribuită prin consolidare și antrenament multi-agent) și Gradient Cloud (o soluție de inteligență artificială orientată către întreprinderi). În robotică, platforma Mirage oferă simulare distribuită, medii interactive dinamice și capacități de învățare masiv paralelă pentru antrenamentul inteligenței întruchipate, accelerând antrenamentul și implementarea modelelor mondiale și a politicilor generale. Mirage explorează potențiale colaborări cu NVIDIA în domeniul motorului său Newton.
Stratul de venituri din activele robotului (RobotFi / RWAiFi)
Acest nivel se concentrează pe etapele cheie ale transformării roboților din „instrumente productive” în „active financiarizabile”, construind infrastructura financiară pentru economia mașinilor prin tokenizarea activelor, distribuția profitului și guvernanță descentralizată. Printre proiectele reprezentative se numără:
XmaquinaDAO – DAO bazat pe inteligență artificială fizică (https://www.xmaquina.io)
XMAQUINA este un ecosistem descentralizat care oferă utilizatorilor globali acces cu lichiditate ridicată la roboți umanoizi de top și companii de inteligență artificială întrupată, aducând în blockchain oportunități care anterior erau disponibile doar firmelor de capital de risc. Tokenul său, DEUS, servește atât ca activ index lichid, cât și ca vehicul de guvernanță, coordonând alocările de trezorerie și dezvoltarea ecosistemului. Prin intermediul Portalului DAO și al Machine Economy Launchpad, comunitatea poate deține și susține colectiv proiecte emergente de inteligență artificială fizică prin participarea tokenizată și structurată on-chain la activele mașinilor.
GAIB – Nivelul economic pentru infrastructura IA (https://gaib.ai/)
GAIB se angajează să ofere un strat economic unificat pentru infrastructura fizică de inteligență artificială, cum ar fi GPU-urile și roboții, conectând capitalul descentralizat cu active reale ale infrastructurii de inteligență artificială pentru a construi un sistem economic inteligent verificabil, compozabil și profitabil.
În domeniul roboticii, GAIB nu „vinde token-uri robotice”, ci mai degrabă financiarizează echipamentele robotice și contractele de operare (RaaS, colectare de date, teleoperare etc.) pe blockchain, transformând „fluxul de numerar real în active generatoare de venituri compozabile on-chain”. Acest sistem cuprinde finanțarea hardware-ului (leasing financiar/staking), fluxul de numerar operațional (RaaS/servicii de date) și veniturile din fluxul de date (licențe/contracte), făcând activele robotice și fluxurile lor de numerar măsurabile, evaluabile și tranzacționabile.
GAIB folosește AID/sAID ca vehicul de decontare și returnare, asigurând randamente stabile prin mecanisme structurate de control al riscurilor (supra-garanțiere, rezerve și asigurări). De asemenea, menține accesul pe termen lung la piețele de instrumente derivate și lichidități DeFi, formând o buclă financiară închisă de la „active robotice” la „active cu randament combinabil”. Scopul său este de a deveni coloana vertebrală economică a inteligenței în era IA.
Harta ecosistemului robotic Web3: https://fairy-build-97286531.figma.site/
V. Rezumat și perspective: Provocări actuale și oportunități pe termen lung
Dintr-o perspectivă pe termen lung, integrarea roboticii, inteligenței artificiale și Web3 își propune să construiască o economie descentralizată a mașinilor (Economia DeRobot), conducând inteligența întrupată de la „automatizarea cu o singură mașină” la colaborarea în rețea care este „bazată pe proprietate, pe decontări și pe guvernanță”. Logica sa centrală este de a crea un mecanism de auto-circulare prin „Jeton → Implementare → Date → Redistribuire a valorii”, permițând roboților, senzorilor și nodurilor de calcul să realizeze proprietatea, tranzacțiile și împărțirea profiturilor.
Totuși, din punct de vedere practic, acest model se află încă în stadiul său exploratoriu incipient, departe de a realiza un flux de numerar stabil și o buclă de afaceri la scară largă. Majoritatea proiectelor rămân la nivel narativ, cu o implementare efectivă limitată. Fabricarea și întreținerea roboților sunt industrii cu capital intensiv, iar stimulentele tokenice singure nu pot susține extinderea infrastructurii; deși modelele financiare on-chain oferă compozabilitate, acestea nu au rezolvat încă problemele de stabilire a prețului riscului și de realizare a randamentului pentru activele reale. Prin urmare, așa-numita „rețea de mașini auto-circulante” rămâne oarecum idealistă, iar modelul său de afaceri are nevoie de validare în lumea reală.
Stratul Model și Inteligență este în prezent cea mai valoroasă zonă pentru dezvoltarea pe termen lung. Sistemele de operare pentru roboți open-source, cum ar fi OpenMind, încearcă să descompună ecosistemele închise și să unifice colaborarea multi-roboți și interfețele de tip limbaj-acțiune. Deși viziunea lor tehnologică este clară, iar sistemele lor sunt complete, volumul de muncă în inginerie este enorm, ciclul de verificare este lung și nu au generat încă feedback pozitiv la nivel industrial.
Stratul Economiei Mașinilor este încă în stadii incipiente. În realitate, numărul de roboți este limitat, iar identitățile DID (Identificare Distribuită) și rețelele de stimulare nu formează încă un ciclu auto-consistent. Suntem încă departe de o adevărată „economie a muncii mașinilor”. Abia după ce inteligența întrupată va fi implementată la scară largă, efectele economice ale identității on-chain, ale așezării și ale rețelelor de colaborare vor deveni cu adevărat evidente.
Stratul de achiziție a datelor are cea mai mică barieră la intrare, dar în prezent este cel mai apropiat de viabilitatea comercială. Achiziția de date de inteligență întrupată necesită niveluri extrem de ridicate de continuitate spatiotemporală și precizie semantică a acțiunilor, determinând calitatea și reutilizabilitatea acesteia. Echilibrarea „scalei de crowdsourcing” cu „fiabilitatea datelor” este o provocare centrală pentru industrie. PrismaX vizează mai întâi nevoile B-end înainte de a distribui sarcinile pentru colectare și verificare, oferind într-o oarecare măsură un șablon replicabil, dar scala ecosistemului și tranzacționarea datelor necesită încă timp pentru acumulare.
Nivelul Middleware și Simulare se află încă în stadiul de verificare tehnologică, lipsindu-i standarde și interfețe unificate și neformand încă un ecosistem interoperabil. Rezultatele simulărilor sunt dificil de standardizat și de migrat în medii reale, ceea ce limitează eficiența Sim2Real.
Stratul de randament al activelor (RobotFi / RWAiFi) Web3 joacă în principal un rol de sprijin în finanțarea lanțului de aprovizionare, leasingul de echipamente și guvernanța investițiilor, îmbunătățind transparența și eficiența decontării, mai degrabă decât remodelând logica industriei.
Desigur, credem că intersecția dintre robotică, inteligență artificială și Web3 reprezintă în continuare originea următoarei generații de sisteme economice inteligente. Nu este vorba doar de o fuziune a paradigmelor tehnologice, ci și de o oportunitate de a restructura relațiile de producție: atunci când mașinile vor poseda identitate, stimulente și mecanisme de guvernanță, colaborarea om-mașină va trece de la automatizare parțială la autonomie în rețea. Pe termen scurt, această direcție va fi în continuare în primul rând narativă și experimentală, dar cadrul instituțional și de stimulare pe care îl stabilește pune bazele ordinii economice a viitoarei societăți a mașinilor. Dintr-o perspectivă pe termen lung, combinația dintre inteligența întrupată și Web3 va remodela limitele creării de valoare - făcând agenții inteligenți entități economice cu adevărat identificabile, colaborative și profitabile.
Declinare de responsabilitate: Acest articol a fost scris cu ajutorul instrumentelor de inteligență artificială ChatGPT-5 și Deepseek. Autorul a depus toate eforturile pentru a verifica și a se asigura că informațiile sunt veridice și exacte, însă omisiunile sunt inevitabile. Ne cerem scuze pentru orice inconvenient. Este deosebit de important de reținut că piața criptomonedelor se confruntă adesea cu o divergență între fundamentele proiectului și performanța prețului de pe piața secundară. Conținutul acestui articol este destinat exclusiv informațiilor și schimburilor academice/de cercetare și nu constituie un sfat de investiții și nici nu ar trebui considerat o recomandare de a cumpăra sau vinde vreun token.