Автор: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Этот независимый исследовательский отчет поддерживается IOSG Ventures, благодарим Ханса (RoboCup Asia-Pacific), Ничанан Кесонпат (1kx), Роберта Кошига (1kx), Аманду Янг (Collab+Currency), Джонатана Виктора (Ansa Research), Лекса Соколина (Generative Ventures), Джея Ю (Pantera Capital), Джеффри Ху (Hashkey Capital) за ценные советы по этому документу. В процессе написания также были запрошены мнения команд проектов OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient, Tashi Network и CodecFlow. Этот документ стремится быть объективным и точным, некоторые мнения могут быть субъективными и не избежать искажений, просим читателей понять.
I. Полный обзор роботов: от автоматизации промышленности до гуманоидного интеллекта.
Традиционная цепочка поставок роботов сформировала полную иерархическую систему снизу вверх, включая четыре основных этапа: ключевые компоненты — промежуточные управляющие системы — производство полных машин — интеграция приложений. Ключевые компоненты (контроллеры, сервы, редукторы, датчики, аккумуляторы и т. д.) имеют наивысшие технологические барьеры, определяющие производительность и нижнюю границу стоимости полной машины; управляющие системы являются "мозгом и малым мозгом" робота, отвечающим за планирование решений и контроль движений; производство полных машин отражает способность к интеграции цепочки поставок. Системная интеграция и приложения теперь определяют глубину коммерциализации и становятся новым ядром ценности.
По приложениям и формам, глобальные роботы эволюционируют по пути от "промышленной автоматизации" через "умные сценарии" к "универсальному интеллекту", формируя пять основных типов: промышленные роботы, мобильные роботы, сервисные роботы, специальные роботы и гуманоидные роботы.
Промышленные роботы (Industrial Robots): нынешняя единственная полностью зрелая категория, широко используемая в сварке, сборке, покраске и транспортировке в производственных процессах. В отрасли уже сформировалась стандартизированная система цепочки поставок, стабильная валовая прибыль и четкий ROI. Подкатегория коллаборативных роботов (Cobots) акцентирует внимание на совместной работе человека и машины, легко внедряется и быстро растет. Представленные компании: ABB, Fanuc, Yaskawa, KUKA, Universal Robots, JAKA, AUBO.
Мобильные роботы (Mobile Robots): включают AGV (автоматизированные направляющие машины) и AMR (автономные мобильные роботы), которые широко используются в логистике и складах, а также в доставке товаров и производственных перевозках, становясь самым зрелым сегментом для B-сторон. Представленные компании: Amazon Robotics, Geek+, Quicktron, Locus Robotics.
Сервисные роботы (Service Robots): предназначены для отраслей, таких как уборка, общественное питание, гостиничный бизнес и образование, являются самым быстрорастущим сегментом на потребительском рынке. Уборочные продукты уже вошли в логику потребительской электроники, а медицинская и коммерческая доставка ускоряют коммерциализацию. Кроме того, возникает ряд более универсальных операционных роботов (например, система с двумя руками Dyna) — более гибких, чем специализированные продукты, но еще не достигли универсальности гуманоидных роботов. Представленные компании: Ecovacs, Roborock, Pudu Tech, Qianlong Intelligence, iRobot, Dyna и другие.
Специальные роботы в основном служат для медицинских, военных, строительных, морских и аэрокосмических сценариев; хотя рынок ограничен, но прибыльность высока и барьеры сильны, что в значительной степени зависит от правительственных и корпоративных заказов, находясь на стадии вертикального роста. Типичные проекты включают Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie и т.д.
Гуманоидные роботы (Humanoid Robots): рассматриваются как будущее "универсальной платформы труда". Представленные компании включают Tesla (Optimus), Figure AI (Figure 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Yushutech, UBTECH, Zhiyuan Robotics и другие.
Гуманоидные роботы являются наиболее обсуждаемым передовым направлением, их основная ценность заключается в том, что их гуманоидная структура адаптируется к существующему социальному пространству, что рассматривается как ключевая форма для достижения "универсальной платформы труда". В отличие от промышленных роботов, ориентированных на максимальную эффективность, гуманоидные роботы подчеркивают универсальную адаптивность и способность к переносу задач, способны входить в фабрики, дома и общественные пространства без переоборудования окружающей среды.
В настоящее время большинство гуманоидных роботов все еще находятся на этапе технической демонстрации, в основном проверяя динамическое равновесие, ходьбу и операционную способность. Хотя уже некоторые проекты начали небольшие развертывания в строго контролируемых заводских условиях (например, Figure × BMW, Agility Digit), и ожидается, что с 2026 года больше производителей (например, 1X) начнут ранние поставки, эти развертывания все еще ограничены "узкими сценариями и единичными задачами", а не настоящими универсальными трудозатратами. В общем, до массовой коммерциализации еще потребуется несколько лет. Основные ограничения включают: проблемы с многими степенями свободы и динамическим балансом; проблемы потребления энергии и автономности, обусловленные плотностью энергии батарей и эффективностью привода; восприимчивость к нестабильности в открытой среде и трудности в обобщении цепочек восприятия и принятия решений; значительный дефицит данных (недостаточно для поддержки обучения универсальных стратегий); проблемы с переносом между формами еще не решены, а также цепочки поставок аппаратного обеспечения и кривые затрат (особенно за пределами Китая) все еще представляют собой реальные барьеры, затрудняющие реализацию масштабных и низкозатратных развертываний.
Ожидается, что путь к коммерциализации в будущем пройдет через три этапа: в краткосрочной перспективе доминирует модель Demo-as-a-Service, зависящая от пилотных проектов и субсидий; в среднесрочной перспективе она эволюционирует в Robotics-as-a-Service (RaaS), создавая экосистему задач и навыков; в долгосрочной перспективе основным станет облако рабочей силы и интеллектуальные подписные услуги, смещая центр ценности от производства оборудования к программному и сервисному сетям. В целом, гуманоидные роботы находятся в критическом переходном периоде от демонстрации к самообучению; возможность преодоления трех барьеров контроля, стоимости и алгоритма будет определять, смогут ли они действительно реализовать воплощенный интеллект.
II. AI × Роботы: Рассвет эпохи воплощенного интеллекта
Традиционная автоматизация в основном полагается на предустановленное программирование и линейное управление (например, архитектура DSOP для восприятия — планирования — управления), что позволяет надежно работать только в структурированных средах. В то время как реальный мир более сложен и изменчив, новое поколение воплощенного интеллекта (Embodied AI) идет по иному пути: через большие модели и унифицированное представление обучения, позволяя роботам развивать способности "понимания — прогнозирования — действий" в различных сценариях. Воплощенный интеллект подчеркивает динамическое взаимодействие между телом (аппаратным обеспечением) + мозгом (моделью) + окружением (взаимодействием), где роботы являются носителями, а интеллект — ядром.
Генеративный AI (Generative AI) принадлежит к интеллекту языкового мира и хорошо понимает символы и семантику; воплощенный интеллект (Embodied AI) принадлежит к интеллекту реального мира и управляет восприятием и действиями. Эти две формы представляют собой "мозг" и "тело", что отражает два параллельных направления эволюции AI. С точки зрения уровня интеллекта воплощенный интеллект выше генеративного, но его зрелость все еще явно отстает. LLM зависит от огромных объемов данных в интернете, создавая четкий замкнутый цикл "данные → вычисления → развертывание"; в то время как интеллектуальные системы роботов нуждаются в данных, тесно связанных с первым взглядом, многомодальными данными и действиями — включая траектории удаленного управления, видео от первого лица, пространственные карты, последовательности действий и т. д., эти данные изначально отсутствуют и должны быть сгенерированы через реальные взаимодействия или высококачественную симуляцию, поэтому они более редки и дороги. Хотя симуляция и синтетические данные могут помочь, они все еще не могут заменить реальные сенсоры и опыт движения, вот почему Tesla, Figure и другие должны строить свои собственные фабрики данных для удаленного управления, а также причина появления третьих сторон для маркировки данных в Юго-Восточной Азии. Проще говоря: LLM учится на готовых данных, тогда как роботы должны "создавать" данные через взаимодействие с физическим миром. В течение следующих 5–10 лет оба направления глубоко интегрируются в модели Vision–Language–Action и архитектуры Embodied Agent — LLM отвечает за высокоуровневое восприятие и планирование, а роботы ответственны за выполнение в реальном мире, формируя двусторонний замкнутый цикл между данными и действиями, способствуя переходу AI от "языкового интеллекта" к настоящему универсальному интеллекту (AGI).
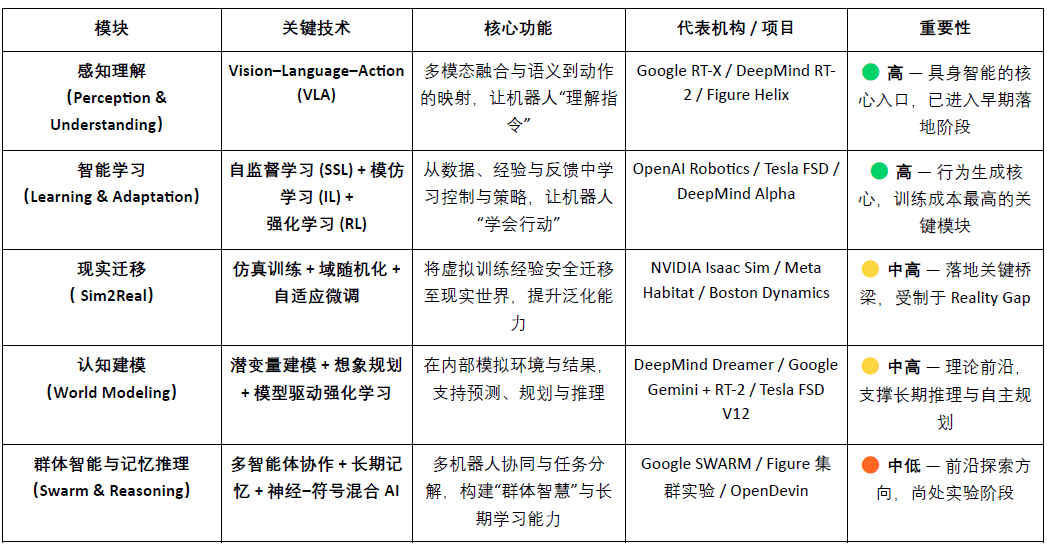
Ядро технологий воплощенного интеллекта можно рассматривать как интеллектуальный стек, созданный снизу вверх: VLA (слияние восприятия), RL/IL/SSL (умное обучение), Sim2Real (передача в реальность), Мировая модель (когнитивное моделирование) и совместная работа нескольких агентов с памятью (Swarm & Reasoning). Среди них VLA и RL/IL/SSL являются "двигателем" воплощенного интеллекта, определяя его реализацию и коммерциализацию; Sim2Real и Мировая модель являются ключевыми технологиями, соединяющими виртуальное обучение и реальное выполнение; совместная работа нескольких агентов и память — это более высокий уровень эволюции групповой и мета-когнитивной деятельности.
Понимание восприятия: модель визуализации — язык — действия (Vision–Language–Action).
Модель VLA интегрирует три канала: визуализацию (Vision) — язык (Language) — действия (Action), позволяя роботам понимать намерения из человеческого языка и преобразовывать их в конкретные действия. Его процесс выполнения включает семантический анализ, распознавание целей (определение целевых объектов из визуального ввода) и планирование пути и выполнение действий, что создает замкнутый цикл "понимания семантики — восприятия мира — выполнения задач", что является одним из ключевых прорывов в области воплощенного интеллекта. Текущие представленные проекты включают Google RT-X, Meta Ego-Exo и Figure Helix, которые продемонстрировали передовые направления в кросс-модальном понимании, погружающем восприятии и управлении на основе языка.
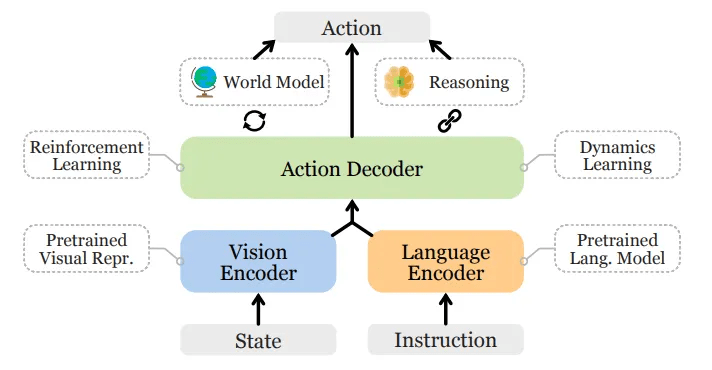
Общая архитектура модели Vision-Language-Action
В настоящее время VLA все еще находится на ранней стадии и сталкивается с четырьмя основными ограничениями:
1) Семантическая неоднозначность и слабая обобщаемость задач: модели трудно понимать нечеткие и открытые инструкции;
2) Нестабильное согласование визуальных и движущихся данных: ошибки восприятия усиливаются при планировании и выполнении пути;
3) Нехватка многомодальных данных и отсутствие единого стандарта: высокие затраты на сбор и аннотацию затрудняют формирование масштабируемого потока данных;
4) Проблемы временных и пространственных осей долгосрочных задач: слишком длинные временные рамки задач приводят к недостаточной способности к планированию и памяти, в то время как слишком большие пространства требуют от моделей рассуждения о вещах "за пределами видимости", в настоящее время VLA не хватает стабильной модели мира и способности к кросс-пространственному рассуждению.
Эти проблемы ограничивают способность VLA к обобщению через различные сценарии и процесс масштабируемого развертывания.
Умное обучение: самообучение (SSL), имитационное обучение (IL) и обучение с подкреплением (RL)
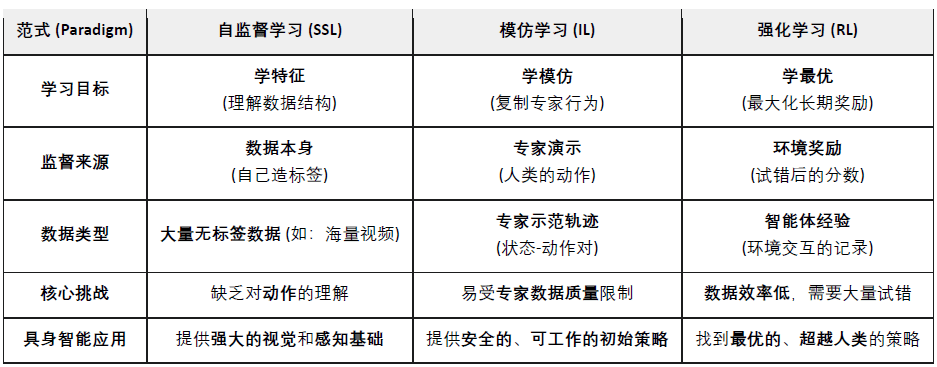
Самообучение (Self-Supervised Learning): автоматическое извлечение семантических признаков из данных восприятия, позволяя роботам "понимать мир". Это эквивалентно тому, чтобы научить машины наблюдать и представлять.
Имитационное обучение (Imitation Learning): быстрое овладение основными навыками через имитацию человеческих демонстраций или примеров экспертов. Это эквивалентно тому, чтобы научить машину действовать, как человек.
Обучение с подкреплением (Reinforcement Learning): через механизмы "вознаграждения-наказания" робот оптимизирует стратегии действий через постоянные проб и ошибок. Это эквивалентно тому, чтобы научить машину расти через пробу и ошибку.
В области воплощенного интеллекта (Embodied AI) самообучение (SSL) направлено на то, чтобы позволить роботам предсказывать изменения состояния и физические законы на основе данных восприятия, чтобы понимать причинно-следственную структуру мира; обучение с подкреплением (RL) является основным двигателем формирования интеллекта, оптимизируя стратегии действий через взаимодействие с окружающей средой и пробу и ошибку на основе сигналов вознаграждения; имитационное обучение (IL) ускоряет этот процесс через демонстрации людей, позволяя роботам быстро приобретать практические навыки. Текущая основная тенденция — объединение всех трех направлений для создания иерархической структуры обучения: SSL предоставляет основу для представления, IL предоставляет человеческие предварительные данные, а RL управляет оптимизацией стратегии, чтобы сбалансировать эффективность и стабильность, формируя основную механику от понимания до действия в области воплощенного интеллекта.
Перенос в реальность: Sim2Real — преодоление разрыва между симуляцией и реальностью.
Sim2Real (Simulation to Reality) позволяет роботам пройти обучение в виртуальной среде, а затем перенести свои навыки в реальный мир. Он генерирует крупномасштабные взаимодействия через высококачественные симуляционные среды (например, NVIDIA Isaac Sim & Omniverse, DeepMind MuJoCo), значительно снижая затраты на обучение и износ оборудования. Его основная задача состоит в сокращении "разрыва между симуляцией и реальностью", а основные методы включают:
Случайная доменизация (Domain Randomization): случайная корректировка освещения, трения, шума и других параметров в симуляции для повышения обобщаемости модели;
Калибровка физической согласованности: использование данных реальных датчиков для калибровки симуляционного движка, увеличивая физическую реалистичность;
Адаптивная донастройка (Adaptive Fine-tuning): быстрое повторное обучение в реальной среде для достижения стабильного переноса.
Sim2Real является центральным элементом внедрения воплощенного интеллекта, позволяя моделям AI учиться в безопасном, недорогом виртуальном мире замкнутого цикла "восприятия — принятия решений — управления". Sim2Real уже достиг зрелости в симуляционном обучении (например, NVIDIA Isaac Sim, MuJoCo), но перенос в реальность все еще ограничен "разрывом реальности", высокими затратами на вычисления и аннотации, а также недостаточной обобщаемостью и безопасностью в открытых средах. Тем не менее, Simulation-as-a-Service (SimaaS) становится самым легким, но стратегически ценным базовым инфраструктурным решением в эпоху воплощенного интеллекта, его бизнес-модель включает подписку на платформу (PaaS), генерацию данных (DaaS) и верификацию безопасности (VaaS).
Когнитивное моделирование: Мировая модель — это "внутренний мир" робота.
Мировая модель (World Model) — это "внутренний мозг" воплощенного интеллекта, позволяющий роботам симулировать окружающую среду и последствия действий, осуществлять прогнозирование и рассуждения. Она изучает динамику окружающей среды, создавая предсказуемое внутреннее представление, которое позволяет агентам "репетировать" результаты до выполнения, эволюционируя от пассивных исполнителей к активным рассуждателям. Проекты, представляющие эту технологию, включают DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim и т. д. Типичные технологические пути включают:
Моделирование скрытых переменных (Latent Dynamics Modeling): сжатие высокоразмерной информации в скрытое состояние;
Имитационное обучение для прогнозирования временных последовательностей (Imagination-based Planning): виртуальное пробование и прогнозирование пути в модели;
Моделирование на основе модели для обучения с подкреплением (Model-based RL): использование мировой модели вместо реальной среды для снижения затрат на обучение.
Мировая модель находится на теоретическом переднем крае в области воплощенного интеллекта, превращая роботов из "реактивных" в "прогнозирующие" системы, но по-прежнему сталкивается с вызовами, связанными со сложностью моделирования, нестабильностью долгосрочного прогнозирования и отсутствием единого стандарта.
Коллективный интеллект и память: от индивидуальных действий к совместному восприятию
Совместная работа нескольких агентов (Multi-Agent Systems) и память с рассуждением (Memory & Reasoning) представляют собой два важных направления эволюции воплощенного интеллекта от "индивидуального интеллекта" к "групповому интеллекту" и "когнитивному интеллекту". Оба поддерживают совместное обучение интеллектуальных систем и их долговременную адаптивность.
Совместная работа нескольких агентов (Swarm / Cooperative RL):
Это означает, что несколько агентов реализуют совместное принятие решений и распределение задач через распределенное или совместное обучение с подкреплением в общей среде. Это направление уже имеет прочную исследовательскую базу, например, эксперимент OpenAI Hide-and-Seek продемонстрировал спонтанное сотрудничество и возникновение стратегий, алгоритмы DeepMind QMIX и MADDPG предоставили рамки для совместного обучения с централизованной подготовкой и децентрализованным выполнением. Эти методы уже были проверены в сценариях управления складами, проверке и управлении группами.
Память и рассуждение (Memory & Reasoning):
Сосредоточение на предоставлении агентам долгосрочной памяти, понимания контекста и способности к причинно-следственному рассуждению является ключевым направлением для достижения переноса между задачами и самоорганизации. Типичные исследования включают DeepMind Gato (унифицированный многозадачный агент восприятия — языка — управления) и серию DeepMind Dreamer (воображаемое планирование на основе мировой модели), а также открытые воплощенные агенты, такие как Voyager, которые достигают постоянного обучения через внешнюю память и самоэволюцию. Эти системы закладывают основу для способности роботов "помнить прошлое и предсказывать будущее".
Глобальная структура отрасли воплощенного интеллекта: сотрудничество и конкуренция сосуществуют.
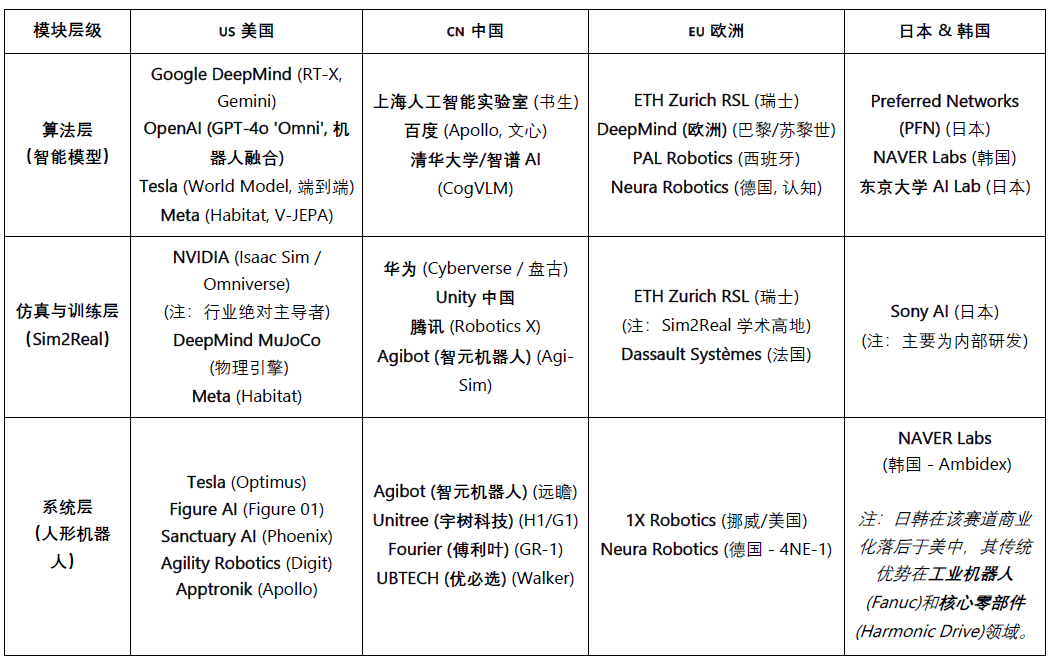
Глобальная робототехническая индустрия находится в периоде "лидерства сотрудничества и углубления конкуренции". Эффективность цепочки поставок Китая, возможности AI США, точность компонентов Японии и промышленные стандарты Европы совместно формируют долгосрочную структуру глобальной робототехнической отрасли.
США сохраняет лидерство в передовых AI моделях и программном обеспечении (DeepMind, OpenAI, NVIDIA), однако это преимущество не распространилось на аппаратное обеспечение роботов. Китайские производители имеют преимущество в скорости итерации и производительности в реальных сценариях. США продвигает возвращение промышленности через (Закон о полупроводниках) (CHIPS Act) и (Закон о снижении инфляции) (IRA).
Китай, благодаря масштабному производству, вертикальной интеграции и политическим стимулам, сформировал ведущие позиции в области компонентов, автоматизированных заводов и гуманоидных роботов, выделяясь в области аппаратного обеспечения и цепочки поставок, такие как Yushutech и UBTECH, которые уже реализовали массовое производство и двигались к уровню интеллектуального принятия решений. Однако в области алгоритмов и симуляционной тренировки еще существует значительный разрыв с США.
Япония долгое время монополизировала технологии высокоточных компонентов и управления движением, промышленная система устойчива, но интеграция AI моделей все еще находится на ранней стадии, темп инноваций остается сравнительно стабильным.
Южная Корея выделяется в распространении потребительских роботов — ведут компании LG, NAVER Labs и обладают зрелой и мощной экосистемой сервисных роботов.
Европа имеет совершенные инженерные системы и стандарты безопасности, такие как 1X Robotics активно участвуют в исследовательском уровне, но некоторые производственные этапы выносятся за пределы, а акцент на инновации смещается в сторону сотрудничества и стандартизации.
III. Робот × AI × Web3: Наративное видение и реальный путь
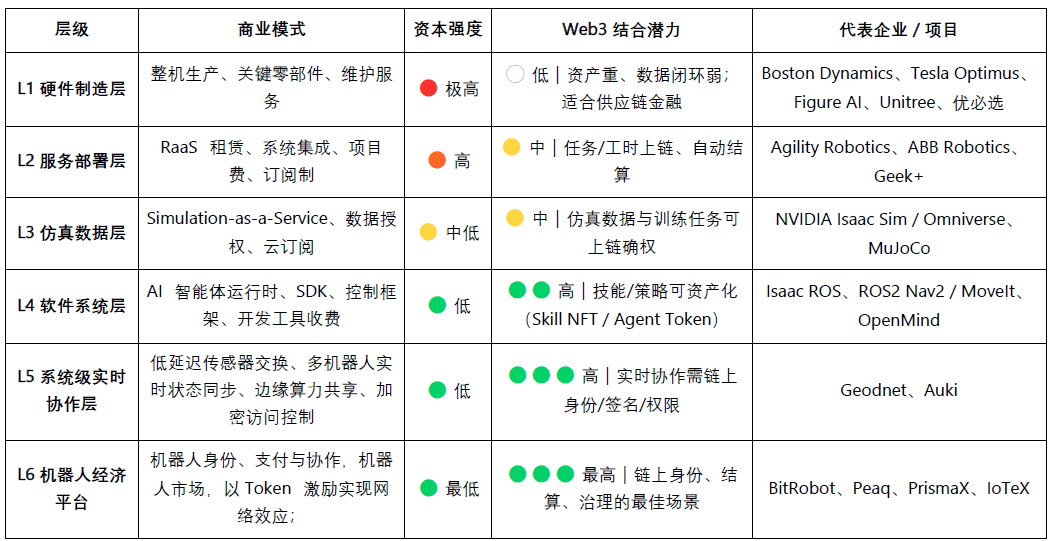
В 2025 году в индустрии Web3 появится новое нарративное сочетание с роботами и AI. Хотя Web3 рассматривается как базовый протокол децентрализованной машинной экономики, его сочетание ценности и осуществимости на различных уровнях все еще различается.
Производство аппаратного обеспечения и уровень обслуживания являются капиталоемкими, а замыкание данных слабое; в настоящее время Web3 может лишь играть вспомогательную роль в цепочках поставок или аренде оборудования;
Существует высокая степень согласования между уровнем симуляции и программного обеспечения, данные симуляции и задачи обучения могут быть подтверждены на блокчейне, а интеллектуальные агенты и модули навыков также могут быть токенизированы через NFT или Агентные токены;
На уровне платформы децентрализованная сеть труда и сотрудничества демонстрирует наибольший потенциал — Web3 может постепенно строить надежный "рынок труда машин" через интегрированные механизмы идентификации, стимулов и управления, закладывая институциональные основы для будущей машинной экономики.
С точки зрения долгосрочного видения, уровни сотрудничества и платформы являются наиболее ценными направлениями интеграции Web3 с роботами и AI. По мере того как роботы постепенно развивают восприятие, язык и способности к обучению, они эволюционируют в умные индивидуумы, способные самостоятельно принимать решения, сотрудничать и создавать экономическую ценность. Эти "умные работники" действительно участвуют в экономической системе, но все еще должны преодолеть четыре основных барьера: идентичность, доверие, стимулы и управление.
На уровне идентичности машины должны иметь удостоверяемую и отслеживаемую цифровую идентичность. Через Machine DID каждый робот, датчик или дрон может создать уникальный проверяемый "идентификационный документ" на блокчейне, связывая его право собственности, записи действий и пределы прав, обеспечивая безопасное взаимодействие и определение ответственности.
На уровне доверия ключевым является обеспечение того, чтобы "труд машин" был проверяемым, измеряемым и оценимым. С помощью смарт-контрактов, оракулов и механизмов аудита, в сочетании с доказательствами физической работы (PoPW), защищенными средами выполнения (TEE) и доказательствами нулевого знания (ZKP), можно обеспечить подлинность и отслеживаемость процесса выполнения задач, придавая экономическую ценность поведению машин.
На уровне стимулов Web3 реализует автоматические расчеты и переработку ценностей между машинами через токеномическую систему стимулов, абстракцию учетных записей и каналы состояния. Роботы могут выполнять аренду вычислительной мощности и обмен данными через микроплатежи, обеспечивая выполнение задач через механизмы залога и наказаний. Благодаря смарт-контрактам и оракулам также можно создать децентрализованный "рынок машинного сотрудничества", не требующий человеческого управления.
На уровне управления, когда машины обладают долгосрочной автономией, Web3 предлагает прозрачную, программируемую структуру управления: совместное принятие решений по параметрам системы через DAO, поддержание безопасности и порядка через многофакторные подписи и механизмы репутации. В долгосрочной перспективе это продвинет машинное общество к стадии "алгоритмического управления" — люди устанавливают цели и границы, машины поддерживают стимулы и баланс через контракты.
Конечное видение интеграции Web3 и роботов: сеть оценки реальных условий — "движущийся механизм реального мира", состоящий из распределенных роботов, постоянно тестирующих способности моделей в разнообразных и сложных физических сценариях; и рынок труда роботов — где роботы выполняют проверяемые реальные задачи по всему миру, получают доход через расчеты по блокчейну и реинвестируют ценность в вычислительные мощности или обновление аппаратного обеспечения.
С реалистичной точки зрения, соединение воплощенного интеллекта и Web3 все еще находится на ранних этапах исследования; децентрализованные машинные интеллектуальные экономики остаются на уровне нарратива и общественного вовлечения. Направления, обладающие реальным потенциалом, в основном проявляются в трех аспектах:
(1) Сбор данных и подтверждение прав — Web3 через стимулы на блокчейне и механизмы отслеживания побуждает вкладчиков загружать данные из реального мира;
(2) Глобальное участие длинного хвоста — транснациональные мелкие платежи и механизмы микростимулов эффективно снижают затраты на сбор и распространение данных;
(3) Финансирование и инновации сотрудничества — DAO модели могут продвигать токенизацию активов роботов, создание доходных свидетельств и механизмы расчетов между машинами.
В общем, краткосрочный фокус в основном сосредоточен на сборе данных и уровне стимулов; в среднесрочной перспективе ожидаются прорывы в "платежах в стабильных монетах + агрегировании длинного хвоста данных" и уровне активов RaaS и расчетов; в долгосрочной перспективе, если гуманоидные роботы массово распространятся, Web3 может стать институциональной основой для собственности на машины, распределения доходов и управления, способствуя формированию настоящей децентрализованной машинной экономики.
IV. Экосистема роботов Web3: карта и отобранные примеры
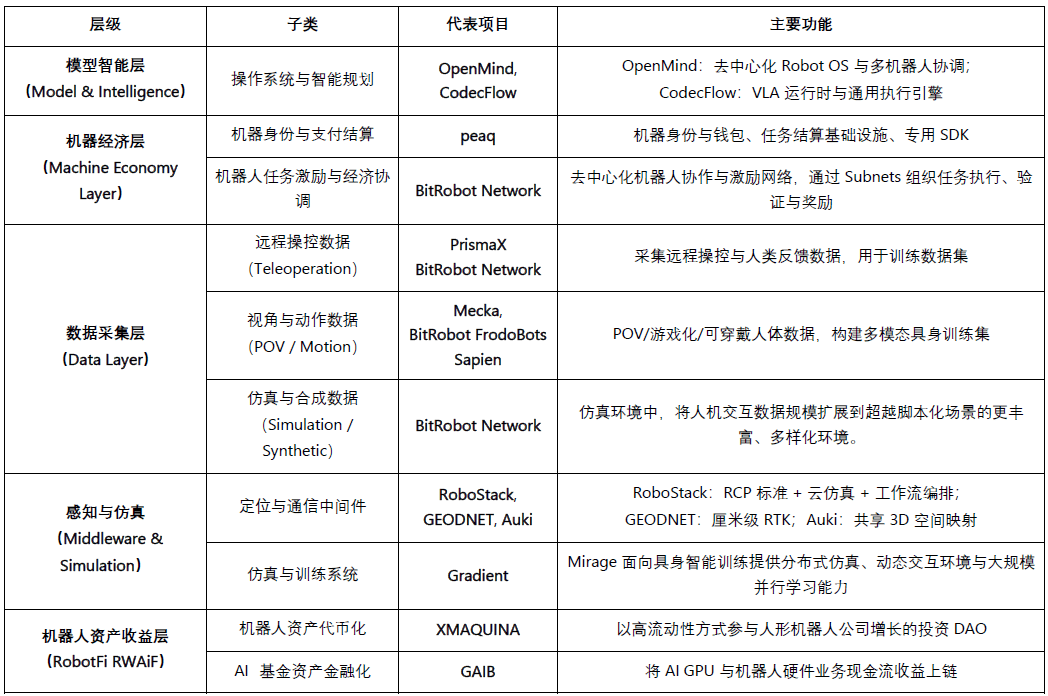
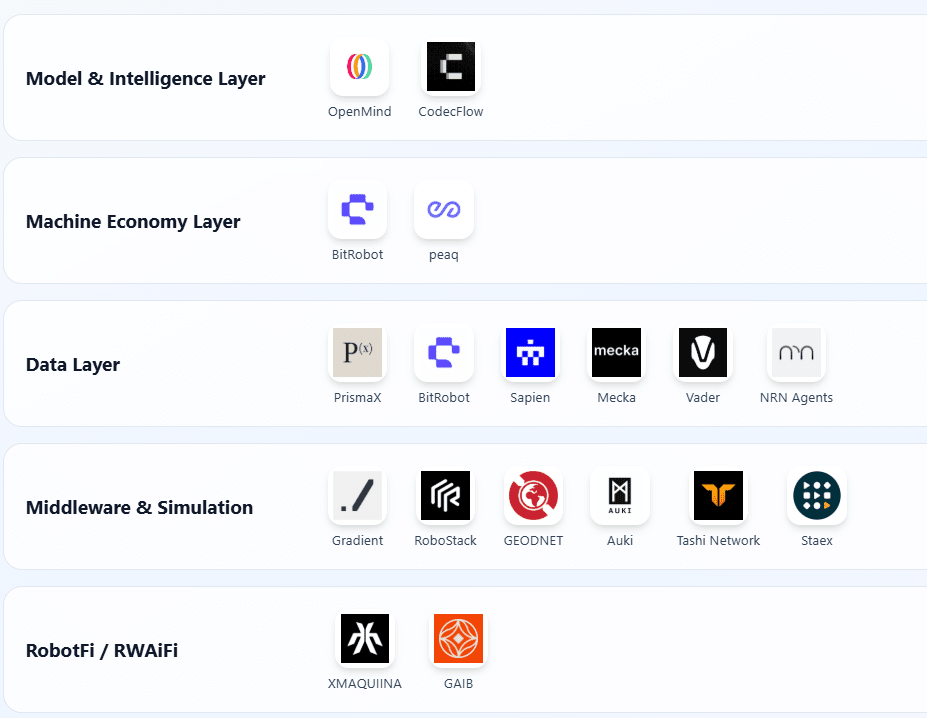
На основе трех стандартов "проверяемого прогресса, открытости технологий, отраслевой актуальности" мы систематизировали текущие представительные проекты Web3 × Robotics и классифицировали их по пяти уровням: уровень интеллектуальных моделей, уровень машинной экономики, уровень сбора данных, базовый уровень восприятия и моделирования, уровень доходов от активов роботов. Чтобы сохранить объективность, мы исключили явно "схожие" или недостаточно документированные проекты; если есть упущения, будем рады исправить.
Уровень интеллектуальных моделей (Model & Intelligence)
Openmind - Создание Android для роботов (https://openmind.org/)
OpenMind — это открытая операционная система (Robot OS) для воплощенного интеллекта (Embodied AI) и управления роботами, цель которой — создать первую в мире децентрализованную среду работы роботов и платформу для разработки. Основные компоненты проекта включают два основных компонента:
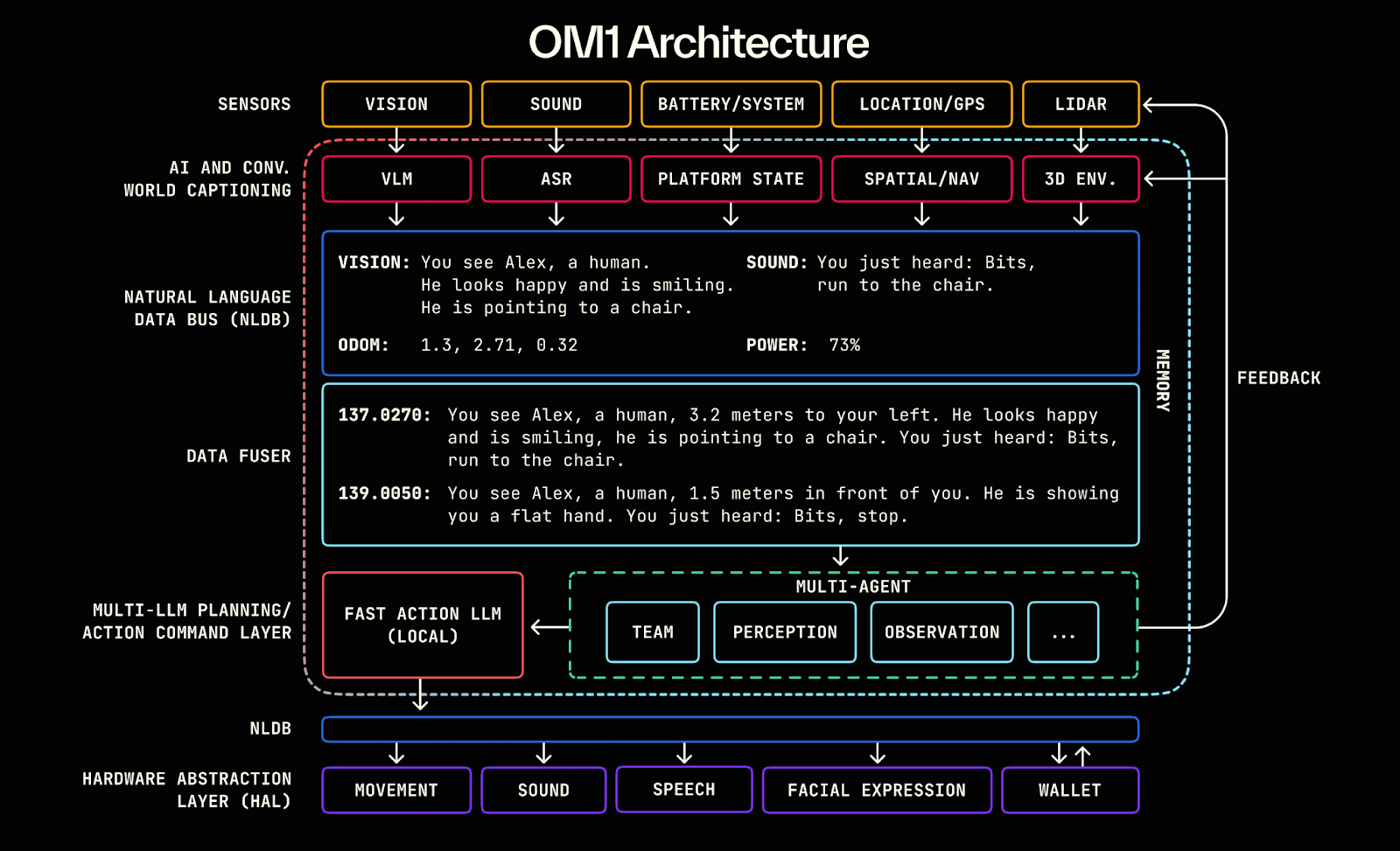
OM1: модульная открытая среда AI-умного тела, построенная на ROS2 (AI Runtime Layer), предназначенная для оркестровки восприятия, планирования и действия, служащая как для цифровых, так и для физических роботов;
FABRIC: распределенный уровень координации (Fabric Coordination Layer), соединяющий облачные вычисления, модели и реальные роботы, позволяя разработчикам контролировать и обучать роботов в унифицированной среде.
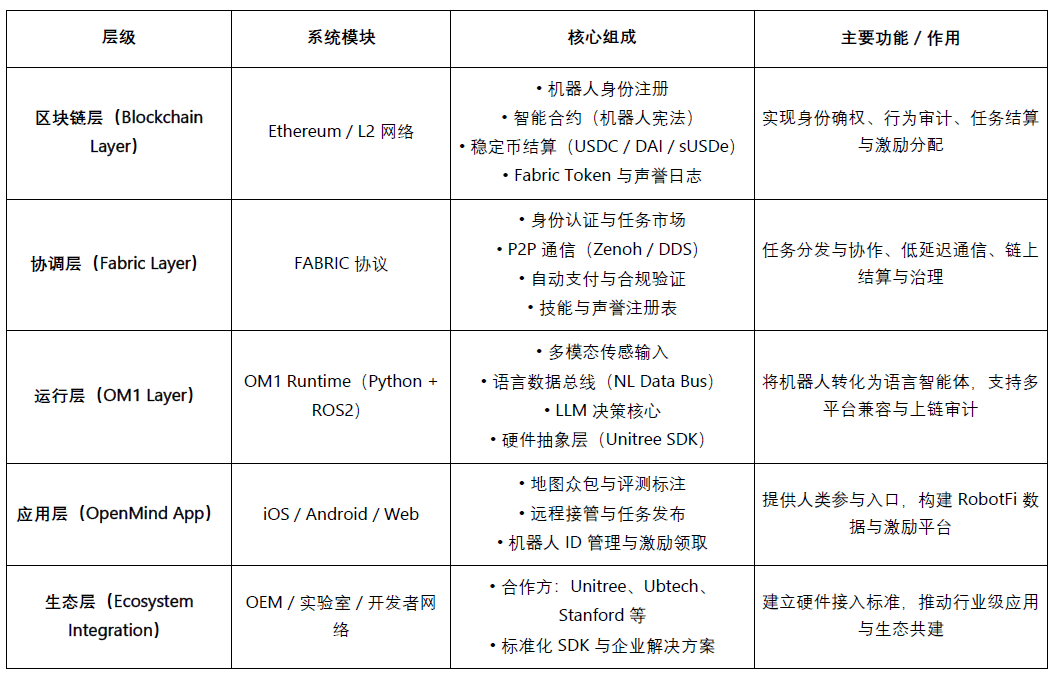
Суть OpenMind заключается в роли интеллектуального промежуточного слоя между LLM (крупной языковой моделью) и миром роботов, позволяя языковому интеллекту действительно преобразоваться в воплощенный интеллект (Embodied Intelligence), создавая интеллектуальный каркас от понимания (Language → Action) до выравнивания (Blockchain → Rules). Многоуровневая система OpenMind создала полный цикл сотрудничества: люди через приложение OpenMind предоставляют обратную связь и аннотации (данные RLHF), сеть Fabric отвечает за верификацию идентичности, распределение задач и координацию расчетов, роботы OM1 выполняют задачи и следуют "конституции роботов" на блокчейне для завершения аудита поведения и оплаты, реализуя децентрализованную сеть машинного сотрудничества от обратной связи человека до сотрудничества по задачам и расчетам по блокчейну.
Прогресс проекта и оценка реальности.
OpenMind находится на ранней стадии "технологической работоспособности, коммерция еще не осуществлена". Основная система OM1 Runtime уже открыта на GitHub, может работать на нескольких платформах и поддерживает многомодальный ввод, обеспечивая понимание задач от языка к действиям через шину данных на естественном языке (NLDB) с высокой степенью оригинальности, но все еще в основном экспериментальна; сеть Fabric и расчет по блокчейну завершены только на уровне проектирования интерфейсов.
С точки зрения экосистемы, проект уже сотрудничает с открытыми аппаратными системами, такими как Unitree, Ubtech, TurtleBot, а также с университетами Stanford, Oxford, Seoul Robotics для образовательных и исследовательских верификаций, но еще не осуществил коммерциализацию. Приложение уже запущено в тестовой версии, но функции стимулов и задач все еще находятся на ранней стадии.
В плане бизнес-модели OpenMind создала экосистему OM1 (открытая система) + Fabric (протокол расчетов) + Skill Marketplace (уровень стимулов), в настоящее время без дохода, полагаясь на ранние инвестиции в размере около 20 миллионов долларов (Pantera, Coinbase Ventures, DCG). В общем, технологии опережают, но коммерциализация и экосистема все еще находятся на начальных этапах, если Fabric удастся реализовать, это может стать "Android эпохи воплощенного интеллекта", но период длительный, риск высокий и сильная зависимость от аппаратного обеспечения.
CodecFlow - Двигатель выполнения для робототехники (https://codecflow.ai)
CodecFlow — это децентрализованный протокол уровня выполнения на основе сети Solana (Fabric), предназначенный для предоставления по запросу среды работы для AI-умных тел и систем роботов, позволяя каждому интеллектуальному телу иметь "мгновенную машину (Instant Machine)". Основные компоненты проекта состоят из трех модулей:
Fabric: уровень агрегирования облачной вычислительной мощности (Weaver + Shuttle + Gauge), который может за считанные секунды создать безопасные виртуальные машины, контейнеры GPU или узлы управления роботами для задач AI;
optr SDK: фреймворк выполнения агентов (Python интерфейс), предназначенный для создания управляемых "Операторов" для настольных, симуляционных или реальных роботов;
Токеновые стимулы: уровень стимулов и расчетов, соединяющий поставщиков вычислений, разработчиков агентов и пользователей автоматизированных задач, формируя децентрализованный рынок вычислений и задач.
Основная цель CodecFlow — создать "децентрализованную базу исполнения для AI и операторов роботов", позволяя любому интеллектуальному агенту безопасно работать в любой среде (Windows / Linux / ROS / MuJoCo / контроллеры роботов), реализуя универсальную архитектуру выполнения от распределения вычислительных мощностей (Fabric) → системной среды (System Layer) → восприятия и действий (VLA Operator).
Прогресс проекта и оценка реальности.
Ранние версии Fabric Framework (Go) и optr SDK (Python) уже опубликованы, их можно запустить в вебе или командной строке для создания изолированных вычислительных экземпляров. Ожидается, что рынок операторов будет запущен в конце 2025 года, позиционируясь как децентрализованный уровень выполнения вычислительных задач для AI.
Основными клиентами являются разработчики AI, исследовательские группы по робототехнике и компании по автоматизации.

Уровень машинной экономики (Machine Economy Layer)
BitRobot - Открытая лаборатория робототехники мира (https://bitrobot.ai)
BitRobot — это децентрализованная исследовательская и кооперационная сеть для воплощенного интеллекта (Embodied AI) и разработки роботов, инициированная FrodoBots Labs и Protocol Labs. Ее основная цель заключается в том, чтобы через открыственную архитектуру "субсети (Subnets) + механизм стимулов + проверяемая работа (VRW)" выполнять следующие ключевые функции:
Определение и верификация реального вклада каждой задачи робота через стандарт VRW (Verifiable Robotic Work);
Предоставление роботам цепочечной идентичности и экономической ответственности через ENT (Embodied Node Token);
Организация межрегионального сотрудничества в научных исследованиях, вычислительной мощности, оборудовании и операторах через Subnets;
Реализация совместного управления человеком и машиной через Senate + Gandalf AI.
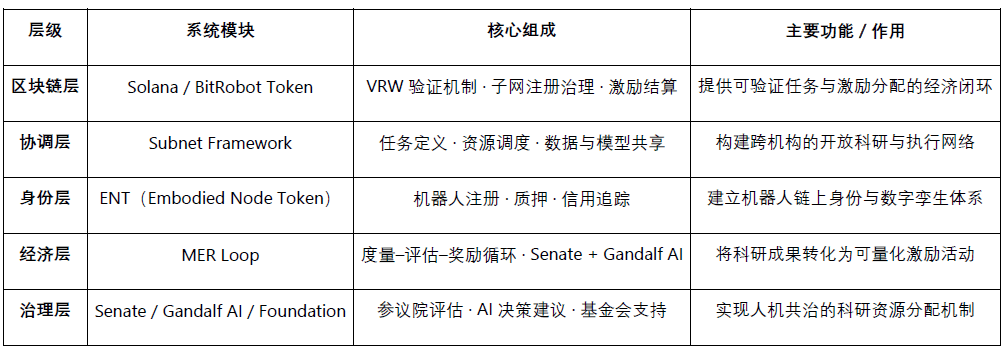
С момента публикации белой книги в 2025 году BitRobot запустила несколько подсетей (например, SN/01 ET Fugi, SN/05 SeeSaw by Virtuals Protocol), реализуя децентрализованное удаленное управление и сбор данных из реальных сценариев, и учредила фонд Grand Challenges на сумму $5M для стимулирования научных конкурсов по разработке моделей по всему миру.
peaq – Экономика вещей (https://www.peaq.network)
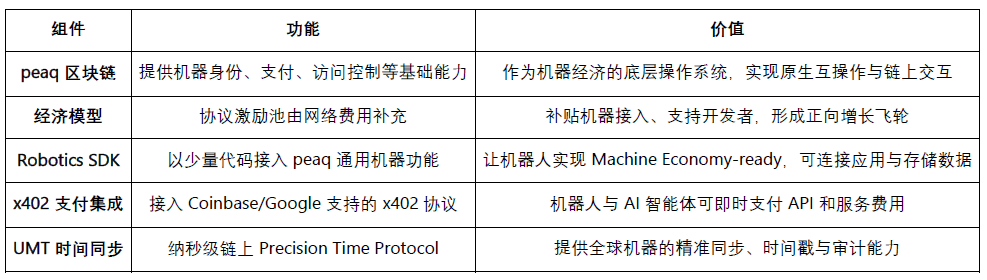
peaq — это блокчейн уровня 1, разработанный для машинной экономики, предоставляющий миллионам роботов и устройств идентичность машин, цепочечный кошелек, контроль доступа и синхронизацию времени на уровне наносекунд (Universal Machine Time). Его Robotics SDK позволяет разработчикам с минимальным количеством кода подготовить роботов к "машинной экономике", обеспечивая совместимость и взаимодействие между производителями и системами.
В настоящее время peaq запустила первую в мире токенизированную ферму роботов и поддерживает более 60 реальных приложений машин. Его токенизированная структура помогает компаниям по производству роботов привлекать средства для капиталоемкого аппаратного обеспечения и расширяет способы участия с традиционных B2B/B2C до более широкого уровня сообщества. За счет пула стимулов на уровне протокола, обеспеченного сетевыми сборами, peaq может субсидировать подключение новых устройств и поддерживать разработчиков, создавая экономический маховик, способствующий ускорению роста проектов роботов и физического AI.
Уровень сбора данных (Data Layer)
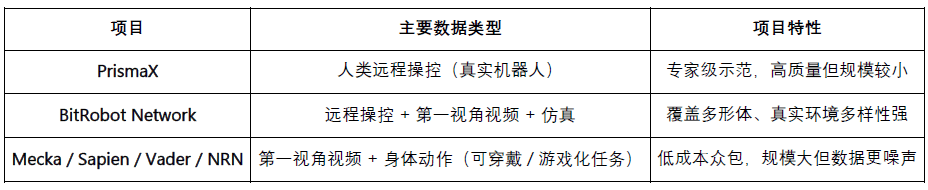
Цель состоит в том, чтобы решить проблему дефицита и высокой стоимости качественных данных из реального мира для обучения воплощенного интеллекта. Это достигается через множество путей сбора и генерации данных взаимодействия человека и машины, включая удаленное управление (PrismaX, BitRobot Network), первый взгляд и захват движений (Mecka, BitRobot Network, Sapien, Vader, NRN), а также симуляцию и синтетические данные (BitRobot Network), предоставляя расширяемую и обобщаемую базу для обучения моделей роботов.
Следует четко понимать, что Web3 не хорош в "производстве данных" — в аппаратном обеспечении, алгоритмах и эффективности сбора Web2-гиганты значительно превосходят любые проекты DePIN. Его истинная ценность заключается в перестройке механизмов распределения и стимулов для данных. Основываясь на "сети платежей в стабильных монетах + модели众包", посредством безразрешительных систем стимулов и механизмов подтверждения прав на блокчейне, реализуются низкие затраты на мелкие расчеты, отслеживание вклада и автоматическое распределение прибыли. Однако открытое众包 все еще сталкивается с проблемами качества и замыкания потребностей — качество данных варьируется, отсутствуют эффективные проверки и стабильные покупатели.
PrismaX (https://gateway.prismax.ai)
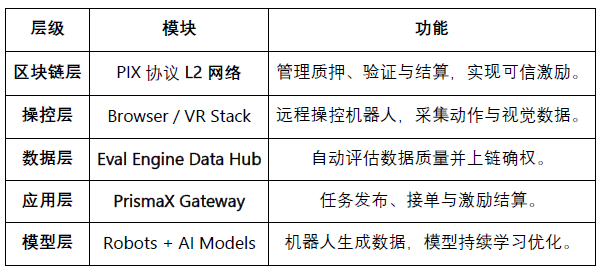
PrismaX — это децентрализованная сеть удаленного управления и экономической информации для воплощенного интеллекта (Embodied AI), предназначенная для создания "глобального рынка труда роботов", позволяя человеческим операторам, роботам и моделям ИИ эволюционировать совместно через цепочечную систему стимулов. Основные компоненты проекта включают два основных компонента:
Стек телеуправления — система удаленного управления (браузерный/VR интерфейс + SDK), соединяющая глобальные манипуляторы и сервисные роботы, обеспечивая возможность удаленного управления людьми и сбора данных;
Eval Engine — движок оценки и верификации данных (CLIP + DINOv2 + семантическая оценка оптического потока), создающий оценку качества для каждой операции и подсчитывающий результаты на блокчейне.
PrismaX, благодаря децентрализованному механизму стимулов, преобразует человеческие действия в данные для обучения машин, создавая полный цикл от удаленного управления → сбора данных → обучения моделей → расчетов по блокчейну, реализуя "труд человека как актив данных" в циклической экономике.
Прогресс проекта и оценка реальности: PrismaX был запущен в бета-версии в августе 2025 года (gateway.prismax.ai), пользователи могут удаленно управлять манипуляторами для выполнения экспериментов по захвату и генерации тренировочных данных. Eval Engine уже работает внутри, в целом, уровень реализации технологий PrismaX достаточно высок, с четким позиционированием, это ключевой промежуточный слой, соединяющий "человеческие операции × модели ИИ × расчет по блокчейну". Его долгосрочный потенциал, как ожидается, станет "дотационной и экономической системой труда и данных в эпоху воплощенного интеллекта", но в краткосрочной перспективе он все еще сталкивается с проблемами масштабирования.
BitRobot Network (https://bitrobot.ai/)
Сеть BitRobot через свои подсети реализует сбор данных из видео, удаленного управления и симуляции. SN/01 ET Fugi позволяет пользователям удаленно управлять роботами для выполнения задач, в процессе взаимодействия, подобного "реальному Pokémon Go", собирая данные о навигации и восприятии. Этот подход способствовал созданию набора данных FrodoBots-2K, который является одним из крупнейших открытых наборов данных навигации человеком, используемым такими организациями, как UC Berkeley RAIL и Google DeepMind. SN/05 SeeSaw (Virtual Protocol) также собирает видео от первого лица в реальной среде с помощью iPhone в крупном масштабе. Другие опубликованные подсети, такие как RoboCap и Rayvo, сосредоточены на использовании недорогих физических устройств для сбора видео от первого лица.
Mecka (https://www.mecka.ai)
Mecka — это компания, занимающаяся данными о роботах, которая через игровое мобильное приложение и настраиваемые аппаратные устройства собирает данные о движении человека и примеры задач, чтобы создать крупномасштабные многомодальные наборы данных, поддерживающие обучение воплощенного интеллекта.
Sapien (https://www.sapien.io/)
Sapien — это краудсорсинговая платформа, сосредоточенная на "данных о движении человека для интеллекта роботов", которая собирает данные о движениях, позах и взаимодействиях человека через носимые устройства и мобильные приложения для обучения моделей воплощенного интеллекта. Проект стремится создать крупнейшую в мире сеть данных о движении человека, чтобы естественное поведение человека стало основной базой данных для обучения и обобщения роботов.
Vader (https://www.vaderai.ai)
Vader собирает видео от первого лица и примеры задач через свое приложение MMO EgoPlay: пользователи записывают свои повседневные действия от первого лица и получают награды в $VADER. Его поток данных ORN может преобразовывать исходные изображения POV в структурированные наборы данных, обработанные для защиты конфиденциальности, содержащие метки действий и семантические описания, которые могут быть использованы непосредственно для обучения стратегии гуманоидных роботов.
NRN Agents (https://www.nrnagents.ai/)
Игровая платформа для сбора данных по воплощенному RL, через управление роботами в браузере и симуляции соревнований, чтобы собрать данные для демонстрации людьми. NRN генерирует длинные хвостовые траектории поведения через "соревновательные" задачи, используемые для имитационного обучения и непрерывного обучения с подкреплением, и служит в качестве расширяемого примитива данных для поддержки стратегии sim-to-real.
Сравнение проектов по сбору данных для воплощенного интеллекта
Восприятие и симуляция (Middleware & Simulation)
Уровень восприятия и симуляции предоставляет роботам ключевую инфраструктуру для соединения физического мира с интеллектуальными решениями, включая навигацию, связь, пространственное моделирование и обучение симуляции, являясь "средним слоем" для создания крупных систем воплощенного интеллекта. В настоящее время эта область все еще находится на раннем этапе исследования, проекты формируют дифференцированные стратегии в направлениях высокоточной навигации, общих расчетов пространства, стандартизации протоколов и распределенной симуляции, и пока не появились единые стандарты или взаимосвязанная экосистема.
Промежуточное программное обеспечение и пространственная инфраструктура (Middleware & Spatial Infra)
Ключевые способности роботов — навигация, позиционирование, связь и пространственное моделирование — составляют ключевой мост между физическим миром и интеллектуальными решениями. Хотя более широкие проекты DePIN (Silencio, WeatherXM, DIMO) начинают упоминать "роботов", ниже перечисленные проекты имеют наиболее прямое отношение к воплощенному интеллекту.
RoboStack – облачный нативный стек робототехники (https://robostack.io)
RoboStack — облачный робототехнический промежуточный слой, реализующий реальное планирование задач роботов, удаленное управление и межплатформенную совместимость через RCP (Robot Context Protocol), и предлагающий облачные симуляции, оркестровку рабочих процессов и возможности подключения агентов.
GEODNET – децентрализованная сеть GNSS (https://geodnet.com)
GEODNET — это глобальная децентрализованная сеть GNSS, предлагающая сантиметровую RTK высокоточную навигацию. Через распределенные базовые станции и стимулы на блокчейне она обеспечивает реальную "географическую эталонную плоскость" для дронов, автономных транспортных средств и роботов.
Auki – Posemesh для пространственных вычислений (https://www.auki.com)
Auki создала децентрализованную сеть пространственных вычислений Posemesh, генерируя реальные 3D-карты окружения через краудсорсинг датчиков и вычислительных узлов, предоставляя общие пространственные эталоны для AR, навигации роботов и многоустройственной кооперации. Это ключевая инфраструктура, соединяющая виртуальное пространство и реальные сценарии, способствуя интеграции AR × Робототехники.
Сеть Tashi — сеть реального времени для сотрудничества роботов (https://tashi.network)
Децентрализованная сеть реального времени для согласования, обеспечивающая согласие менее чем за 30 мс, обмен датчиками с низкой задержкой и синхронизацию состояния нескольких роботов. Его MeshNet SDK поддерживает совместное SLAM, групповые взаимодействия и обновление карт, обеспечивая высокопроизводительный уровень реального сотрудничества для воплощенного AI.
Staex — децентрализованная сеть подключения и телеметрии (https://www.staex.io)
Децентрализованный уровень подключения, исходящий из исследовательского отдела Deutsche Telekom, предлагает безопасную связь, надежную телеметрию и маршрутизацию от устройства к облаку, позволяя надежно обмениваться данными и сотрудничать между различными операторами в роботизированных флотах.
Системы симуляции и обучения (Distributed Simulation & Learning)
Gradient - к открытой интеллектуальной системе (https://gradient.network/)
Gradient строит AI-лабораторию "открытого интеллекта (Open Intelligence)" и стремится осуществить распределенное обучение, размышления, верификацию и симуляцию на основе децентрализованной инфраструктуры; его текущий стек технологий включает Parallax (распределенное размышление), Echo (распределенное обучение с подкреплением и обучение с несколькими агентами) и Gradient Cloud (AI-решения для бизнеса). В области робототехники платформа Mirage предоставляет распределенную симуляцию, динамическую интерактивную среду и возможности масштабного параллельного обучения для ускорения обучения мировых моделей и универсальных стратегий. Mirage в настоящее время обсуждает потенциальное направление сотрудничества с NVIDIA и его движком Newton.
Уровень доходов от активов роботов (RobotFi / RWAiFi)
Этот уровень сосредоточен на критическом этапе превращения роботов из "производительных инструментов" в "финансовые активы", создавая финансовую инфраструктуру для машинной экономики через токенизацию активов, распределение доходов и децентрализованное управление. Примеры проектов включают:
XmaquinaDAO – DAO физического AI (https://www.xmaquina.io)
XMAQUINA — это децентрализованная экосистема, предлагающая глобальным пользователям высоколиквидные каналы участия в ведущих гуманоидных роботах и компаниях воплощенного интеллекта, принося возможности, которые ранее принадлежали только венчурным капитальным учреждениям, на блокчейн. Его токен DEUS является как индексным активом ликвидности, так и носителем управления, используемым для координации распределения казны и развития экосистемы. Через DAO Portal и Machine Economy Launchpad сообщество может участвовать в токенизации и структурировании машинных активов на блокчейне, совместно владеть и поддерживать новые проекты физического AI.
GAIB – Экономический уровень для AI инфраструктуры (https://gaib.ai/)
GAIB стремится создать единую экономическую систему для инфраструктуры AI, обеспечивая соединение децентрализованного капитала с реальными активами AI, строя проверяемую, комбинируемую и доходную систему экономики интеллекта.
В области робототехники GAIB не "продает токены роботов", а осуществляет финансирование аппаратного обеспечения за счет финансовизации оборудования роботов и операционных контрактов (RaaS, сбор данных, дистанционное управление и т. д.), преобразуя "реальные денежные потоки → ликвидные активы на блокчейне". Эта система включает в себя финансирование аппаратного обеспечения (лизинг/залога), операционные денежные потоки (RaaS/данные услуг) и доходы от потоков данных (лицензия/контракт), что делает активы роботов и их денежные потоки измеримыми, оценимыми и торгуемыми.
GAIB использует AID / sAID в качестве носителей расчетов и доходов, обеспечивая устойчивую прибыль через структурированные механизмы управления рисками (избыточное залогирование, резервы и страховка), и долгое время подключается к производным и ликвидным рынкам DeFi, формируя финансовый замкнутый цикл от "активов роботов" до "комбинируемых доходных активов". Цель состоит в том, чтобы стать экономическим позвоночником эпохи AI (Economic Backbone of Intelligence).
Экосистема роботов Web3: https://fairy-build-97286531.figma.site/
V. Резюме и перспектива: реальные вызовы и долгосрочные возможности
С точки зрения долгосрочного видения, интеграция роботов × AI × Web3 направлена на создание децентрализованной системы машинной экономики (DeRobot Economy), продвигая воплощенный интеллект от "автоматизации на единичных платформах" к "можно удостоверять, рассчитывать и управлять" сетевому сотрудничеству. Его основная логика заключается в том, чтобы сформировать механизм самоподдержки через "Token → Развертывание → Данные → Переопределение ценности", позволяя роботам, датчикам и вычислительным узлам реализовать удостоверение, торговлю и распределение прибыли.
Тем не менее, с текущей точки зрения, эта модель все еще находится на ранней стадии исследования, и до создания стабильного денежного потока и масштабируемого коммерческого цикла еще далеко. Большинство проектов остается на уровне нарратива, реальное развертывание ограничено. Производство роботов и их эксплуатация относятся к капиталоемким отраслям, и полагаться только на стимулы токенов недостаточно для поддержки расширения инфраструктуры; хотя проектирование финансов на блокчейне имеет высокую сочетаемость, оно все еще не решает вопросы ценообразования рисков и реализации доходов от реальных активов. Таким образом, так называемая "самоподдерживающаяся сеть машин" остается более идеализированной, а ее бизнес-модель нуждается в реальной проверке.
Уровень интеллектуальных моделей (Model & Intelligence Layer) является наиболее ценным направлением в долгосрочной перспективе. Открытая операционная система роботов, представленная OpenMind, пытается разрушить закрытую экосистему, унифицировать взаимодействие нескольких роботов и языковые интерфейсы до действий. Ее техническое видение ясно, система полна, но объем работы огромен, а сроки верификации длинные, и еще не создано позитивное повторное подтверждение на уровне промышленности.
Уровень машинной экономики (Machine Economy Layer) все еще находится на предварительной стадии, в реальности количество роботов ограничено, а DID идентичности и сети стимулов еще трудно сформировать в самосогласованный цикл. Текущие расстояния до "экономики машинного труда" еще далеки. В будущем только воплощенный интеллект, достигнувший масштабного развертывания, может привести к реальному экономическому эффекту идентичности на блокчейне, расчетам и сетям сотрудничества.
Уровень сбора данных (Data Layer) имеет относительно низкий порог, но в настоящее время это наиболее близкое направление к коммерческой жизнеспособности. Сбор данных для воплощенного интеллекта требует высокой непрерывности во времени и пространстве и точности семантики действий, что определяет их качество и повторное использование. Как сбалансировать "масштаб众包" и "надежность данных" является основной задачей отрасли. PrismaX сначала фиксирует потребности B-стороны, а затем распределяет задачи для сбора и верификации, что в определенной степени предоставляет воспроизводимый шаблон, но масштаб экосистемы и торговля данными все еще требуют времени для накопления.
Уровень восприятия и моделирования (Middleware & Simulation Layer) все еще находится на стадии технической верификации, не хватает единого стандарта и интерфейса, и еще не сформирован взаимосвязанный экосистема. Результаты моделирования трудно стандартизировать и перенести в реальную среду, эффективность Sim2Real ограничена.
Уровень доходов от активов (RobotFi / RWAiFi) Web3 в основном играет вспомогательную роль в цепочках поставок, аренде оборудования и инвестиционном управлении, повышая прозрачность и эффективность расчетов, а не перестраивая логистику отрасли.
Конечно, мы считаем, что точка пересечения роботов × AI × Web3 все еще представляет собой исходную точку для следующей генерации интеллектуальной экономики. Это не только слияние технологических парадигм, но и возможность перестройки производственных отношений: когда машины получают идентичности, стимулы и механизмы управления, сотрудничество между человеком и машиной переходит от частичной автоматизации к сетевой автономии. В краткосрочной перспективе это направление по-прежнему фокусируется на нарративе и экспериментах, но закладываемая структура и стимулы создают основу для будущего экономического порядка машинного общества. С долгосрочной перспективы сочетание воплощенного интеллекта и Web3 изменит границы создания ценности — позволяя интеллектуальным агентам стать настоящими экономическими субъектами, которые можно удостоверять, сотрудничать и получать доход.
Отказ от ответственности: в процессе написания этой статьи использовались инструменты AI ChatGPT-5 и Deepseek, автор сделал все возможное, чтобы проверить и убедиться в достоверности и точности информации, но все же не исключены упущения; за это прошу прощения. Особенно важно отметить, что на рынке криптоактивов обычно наблюдается расхождение между основными показателями проектов и вторичным рыночным ценовым поведением. Содержимое этой статьи предназначено только для объединения информации и академического/исследовательского обмена и не является инвестиционной рекомендацией, и не следует воспринимать как рекомендацию по покупке или продаже каких-либо токенов.